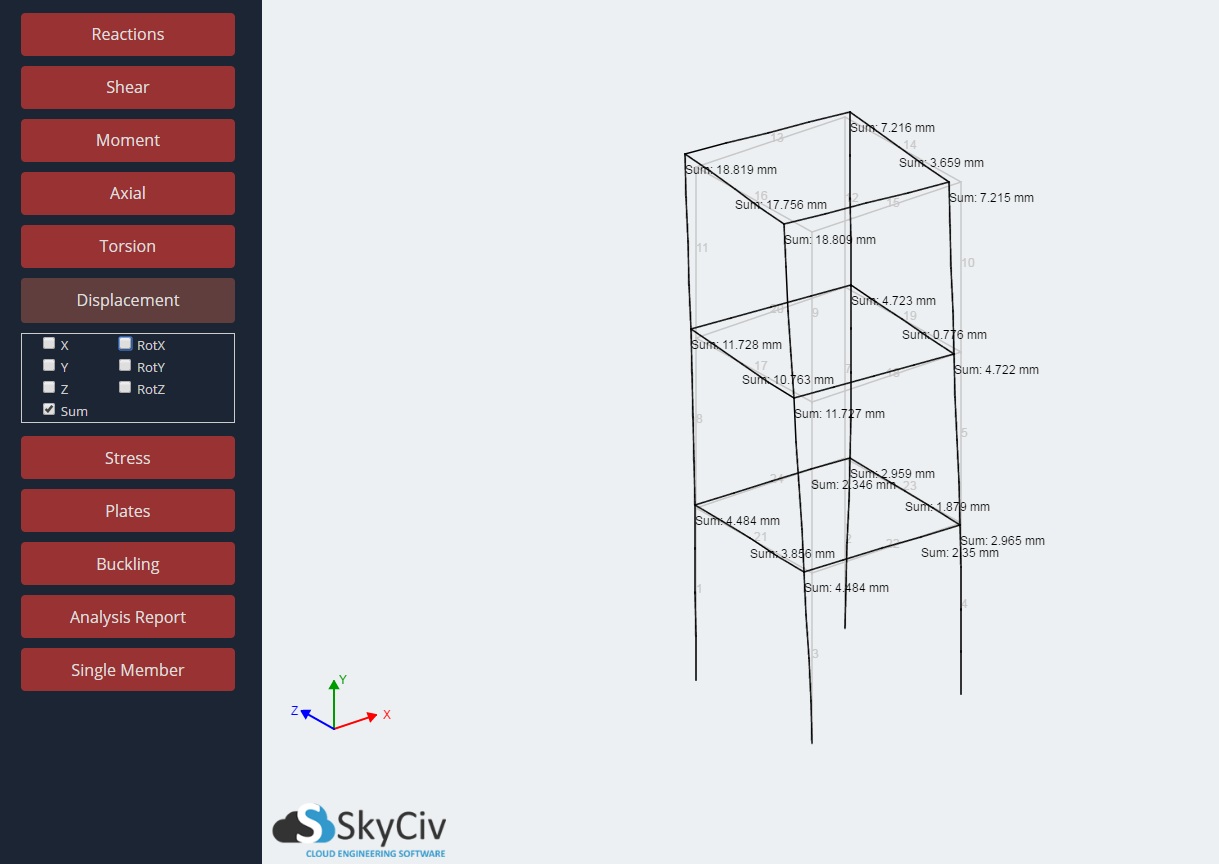
構造の各部材の単一部材の変位値を表示します. 変位の値は、各メンバーの開始ノードと終了ノードに表示されます. チェックボックスを使用して、距離と回転変位の両方の値をオンまたはオフにできます. 値はコンポーネントグローバルXに分けられます, そして, およびZ値 (または距離変位の合計).
注意, 他の表示オプションと同じように, 表示される内容は、左側のドロップダウンで選択されている荷重の組み合わせ/エンベロープによって異なります。. 変位ラベルをドラッグして、明瞭さを向上させることができます. 構造を回転またはドラッグすることで、ラベルの位置をリセットできます.
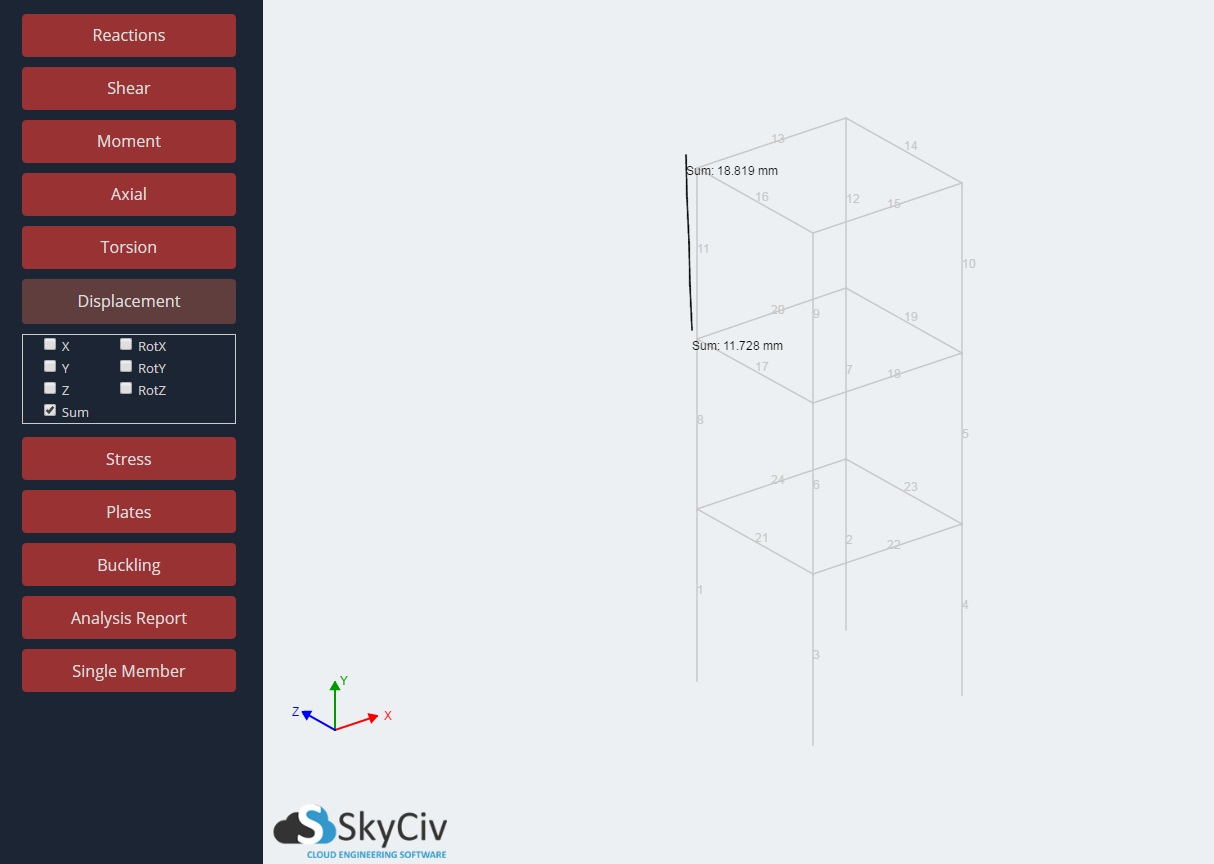
例えば, 変位結果がオンになっている, ワイヤーフレームは常にモデルの変位した形状を表示します. 図のように、変位結果の任意の組み合わせのオンとオフを切り替えることができます:
たわみのスケーリングとアニメーション
結果を確認したり、モデルの問題を特定したりするには、構造のたわみを拡大縮小したりアニメートしたりすると役立つことがよくあります。. 例えば, 構造のたわみをアニメーション化する場合、切断された部材の識別がはるかに簡単になります:
たわみをアニメートするには, 垂直スライダーをスクロールするだけです (画面の右側にあります) 上下. または単に, を保持します “S” キーを押してマウスをスクロールします (Sは 規模).
L/たわみ比の結果
この一般的な比率は、たわみ限界に使用する当座比率をユーザーに提供するのに役立ちます. エンジニアが結果を正しく解釈できるように、ソフトウェアがこれらの値を計算する方法を理解することが重要です. この結果は、多くの場合、L/xxとして表されます。. 値が, xx, 一定の基準を下回っている (例えば 250) その基準を満たしていないものと見なされます. より正確な分析とチェックのために, SkyCivは2つのたわみ/スパン計算を実行します:
メソッドによるスパン 1: 継続会員の場合, メンバーに沿った各ノード/接続が拘束またはブレースとして機能することを前提としています.
メソッドによるスパン 2: 継続会員の場合, スパンは、メンバーに沿ったノード/接続に関係なく、メンバーの全長にわたって取得されます.
どちらの方法でも, SkyCivは分母を計算します (xx値) メンバーの長さをメンバーの長さで割ってこの結果を計算します ローカル 相対たわみ. の ローカル 相対的な部材のたわみ は、部材のたわみ形状の両端間の線からのたわみです。:
両方の方法を利用することによって, SkyCivは、さまざまなシナリオで支配的なたわみ比を識別して正しく計算できます. 例えば:
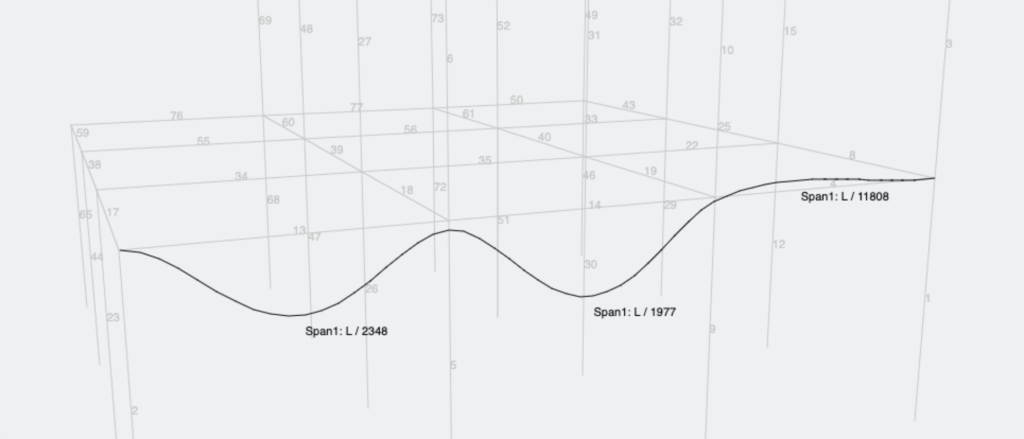
例 1: メンバー 30 抑制されている (接続されたメンバーを介して) 中点で, スパン 1 より適切であり、考慮する必要があります:
例 2: 一番下のメンバーはメンバーを接続しています, しかし、何の抑制も提供していません. だからスパン 2 より適切であり、統治します. 次の図は、スパン比の違いを簡単に説明しています。:
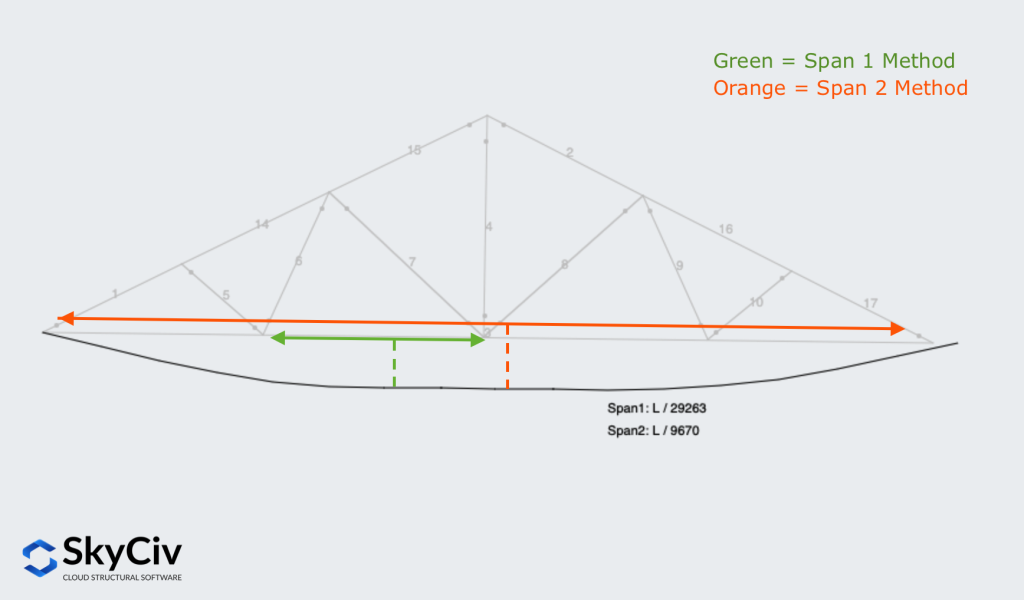
両方のケースを考慮することが重要です, 従来のたわみスパン比を見ると (単に2人のメンバーの間), トラス全体の全体的なたわみを見逃す可能性があります, これはで表されます スパン 2 方法.
詳細なたわみ率の例
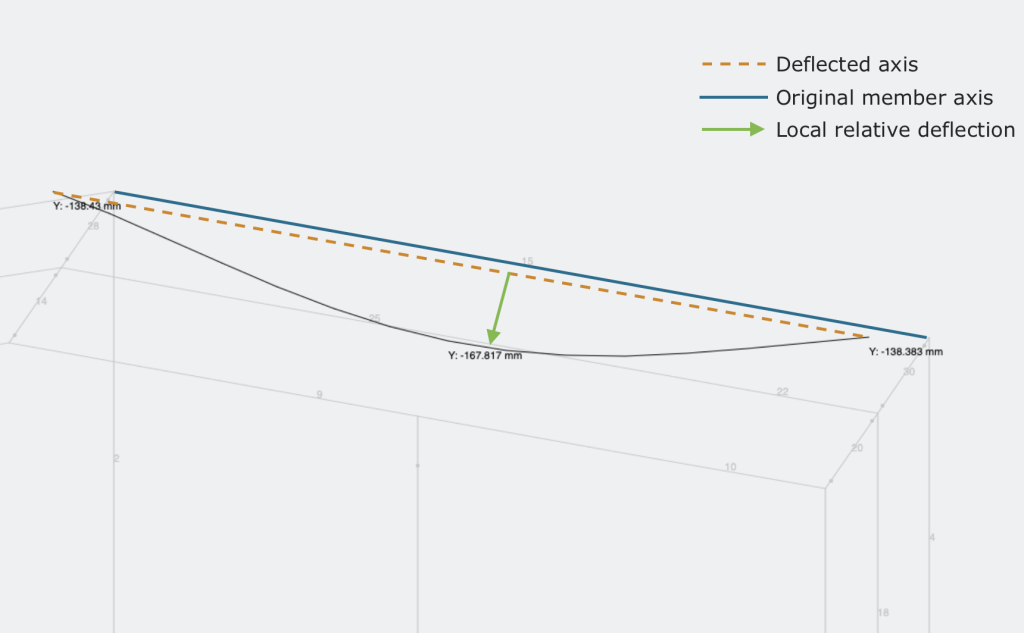
構造3D, 変位した部材軸に垂直なたわみを決定することにより、ユーザーのたわみ率を計算します, これを部材の変位した長さと比較します. これは 局所的な相対たわみ 上記のセクションで定義されているように.
グラフの緑色の線は、変位した部材軸からの部材のたわみを示しています. これは、S3Dがdを決定するために使用するものです / L値. これらの値を使用して、このたわみ率を逆算できます。 (SkyCivのシングルメンバー分析機能も使用):
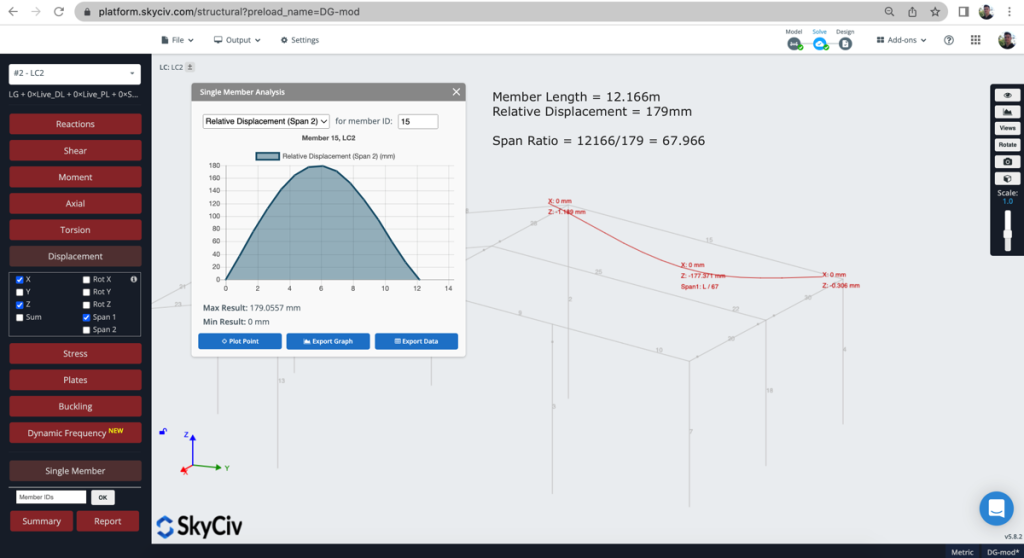
メンバーの長さ: 12.166メートル
相対変位: 179んん
12166 / 179 = 67.96
そのため、たわみ比は 1 / 67 (L/67として表されます).
注意: ソフトウェアは、保守性のために最も近い整数に自動的に切り捨てられます.
カンチレバーのたわみ
カンチレバーの相対変位を計算することは多くの場合困難であり、, 実際に, あまり有益ではありません. エンジニアは通常、チップの絶対変位を気にします, これは保守性とたわみに対するユーザーの認識を左右するためです。. このために, SkyCiv がメンバーをカンチレバーとして識別したとき, 絶対変位の値を相対変位フィールドに割り当てます。.
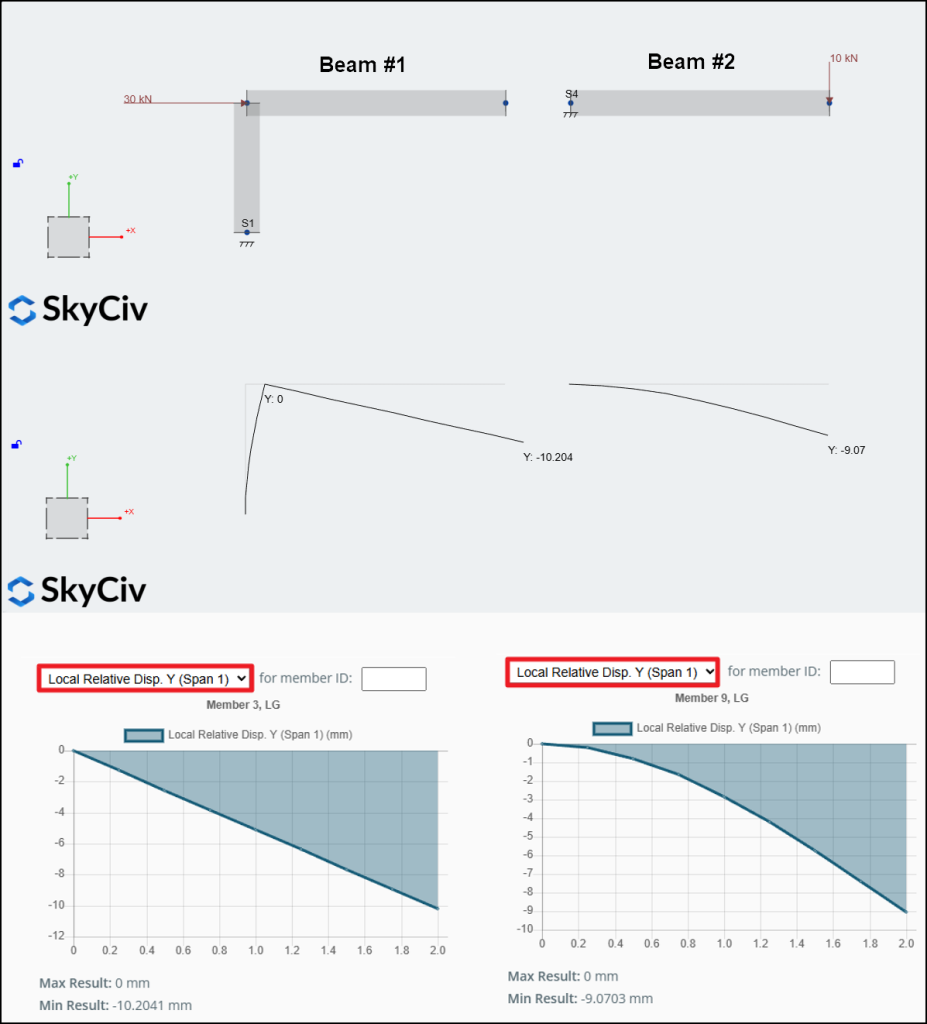
以下の図はその概念を示しています:
- ビーム #1: 先端の変位は主に剛体の動きによって引き起こされます, 内部ひずみによるものではない. 理論的には, これにより、次の相対変位が得られます。 0 んん との絶対変位 10.2 んん. しかしながら, 部材がカンチレバーとして検出されるため, SkyCiv は、次の相対変位を報告しています。 10.2 んん 先端で.
- ビーム #2: SkyCiv は理論上の動作と一致します. 部材の内部の曲がりにより、先端の変位が生じます。 9.07 んん, これは相対値と絶対値の両方で同じです.
カンチレバーの相対変位を絶対変位と一致するように調整することで、保守性のチェックが可能になります。, 相対変位に対するスパン対たわみ比をチェックします。, どちらの場合でも正確さを保つために.
カンチレバーの自動検出
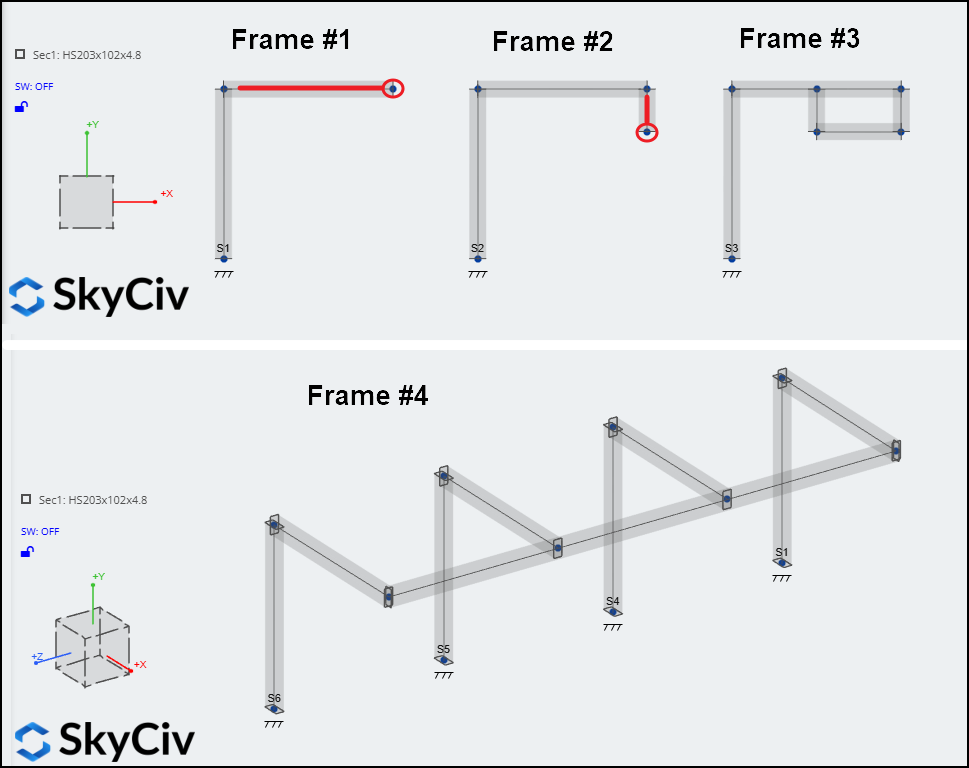
SkyCiv のカンチレバー検出アルゴリズムは非常にシンプルです: メンバーに自由端があり、他のメンバーがアタッチされていない場合, カンチレバーとみなされます. 追加の部材が片持ち部材の自由端に接続される、より複雑な配置を扱う場合、ユーザーはたわみ制限を検討する必要があります。. 以下の例では, フリーチップとカンチレバーメンバーは赤色で表示されます:
- フレーム 1: 水平ビームのみカンチレバーとして自動検出されます。, 列も同様に動作すると主張する人もいるかもしれませんが、.
- フレーム 2: 梁も柱も検出されない, ただし、吊り下げられたメンバーはカンチレバーとみなされます.
- フレーム 3: カンチレバー部材が検出されません.
- フレーム 4: カンチレバー部材が検出されません.
前述したように, 4つの場合すべてにおいて, ユーザーは結果を解釈する際に注意する必要があります.