Quando si modella una struttura in SkyCiv Structural 3D, i membri e le connessioni sono semplificati con nodi e righe per i membri. Queste linee tra i nodi passano sempre attraverso il baricentro di ciascun membro per semplicità e continuità. In realtà, si verificano situazioni in cui il carico che agisce su un'asta non può essere giustificato attraverso il suo baricentro, questo è un carico eccentrico. Gli ingegneri devono pensare ai carichi eccentrici durante la progettazione delle aste a causa dell'aggiunta della rotazione della sezione trasversale, o Torsione, può, e molto probabilmente lo farà, influenzare lo stato limite della sezione trasversale.
Per esempio: un carico puntuale sopra un pavimento a sbalzo dall'alto, o un carico sospeso dal lato di una trave fissata agli irrigidimenti. Un semplice grafico dei carichi eccentrici e come interpretarli è mostrato in Figura 1.
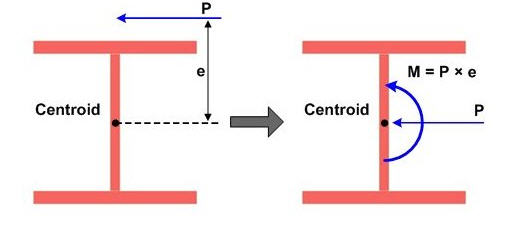
figura 1: Esempio di carico eccentrico su una sezione ad I
fonte: http://manual.midasuser.com
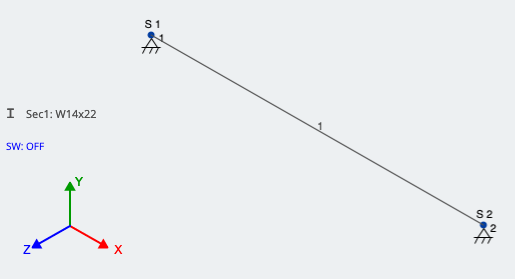
Diamo un'occhiata a un esempio in SkyCiv Structural 3D e applichiamo un carico eccentrico in due modi diversi. Primo, supponiamo di avere una trave W14x22 15 piedi di lunghezza con un carico punto eccentrico a metà campata di 10 kips, recitazione 12 a pochi centimetri dal baricentro. Assumiamo che il carico agisca verso il basso (-Direzione Y) e al lato sinistro (+Direzione Z) del membro. Anche, assumeremo che il peso proprio sia disattivato, per semplicità.
Quando si modella un singolo membro, assicurati che i tuoi supporti siano corretti durante la modellazione di un carico eccentrico. L'analisi non verrà eseguita con entrambi i supporti della trave impostati come pin 3D perché nessuno dei due supporti resisterà alla rotazione della sezione trasversale. Nel nostro caso, il supporto più lontano dall'origine è solo un perno 2D che consente la rotazione nella direzione X e Y, proveniente dalla deflessione verticale e orizzontale. Diamo un'occhiata al nostro membro di esempio nello spazio di modellazione 3D:
Adesso, diamo un'occhiata ai due metodi per tenere conto dell'eccentricità del nostro carico. Facendo riferimento alla figura 1, nel nostro caso:
\({P} = {10} kip)
\({e} = 12 pollici = 1 foot\)
Metodo 1: Contabilità dell'eccentricità applicando un Momento
Come mostrato in figura 1, possiamo spiegare l'eccentricità del carico applicando un momento aggiuntivo al baricentro dell'asta. Questo momento si trova prendendo il carico puntuale moltiplicato per il braccio di momento, o “e”. Dobbiamo ancora tenere conto del carico di punti stesso, quindi ci sarà (2) carichi nel luogo identificato.
Nel nostro caso:
\({M} = {P}*{e}\)
\({M} = 10 kips * 1 piede = 10 kip-ft)
Come accennato, questo momento viene ora applicato nella stessa posizione lungo l'asta del carico eccentrico. SkyCiv riconosce il momento positivo come in senso antiorario attorno all'asse che viene applicato, che è attorno all'asse X globale nel nostro caso. Guarda la figura 3 di questi carichi applicati in SkyCiv 3D:
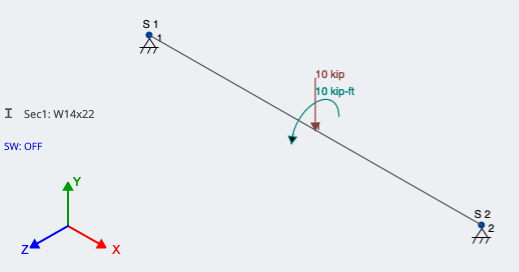
figura 3: Modellazione del carico eccentrico applicando un momento aggiuntivo
Metodo 2: Utilizzo di collegamenti rigidi
Un altro metodo consiste nell'utilizzare collegamenti rigidi. Collegamenti rigidi sono pensati come membri immaginari che ruotano e traducono con qualunque cosa sia connessa. Non deviano tra i loro nodi e sono completamente rigidi. I collegamenti rigidi sono identificati nello spazio di modellazione 3D come grigio chiaro e hanno a “R” accanto a loro, come mostrato in figura 4. Perché sono più utilizzati per collegare elementi e carichi, hanno bisogno di una dimensione o di un ID sezione.
Per il nostro esempio, Nodo 6 è a metà corsa sul membro. Nodo 5 è alla stessa coordinata X, ma 1.0 piedi nella direzione +Z; Nodo 5 è la posizione effettiva del carico eccentrico.
Crea/disegna un membro tra i due nodi, e assegnalo come collegamento rigido. Puoi farlo premendo il tasto Avanzate passare nella finestra dei membri, poi andando a genere e cambiandolo in Collegamento Rigido. Una volta applicato, il membro dovrebbe apparire come descritto sopra. Con un'estremità che indica la posizione effettiva del carico eccentrico e l'altra estremità collegata all'elemento in direzione perpendicolare, il carico può finalmente essere applicato. Questo è mostrato in Figura 4; la freccia rossa punta al collegamento rigido:
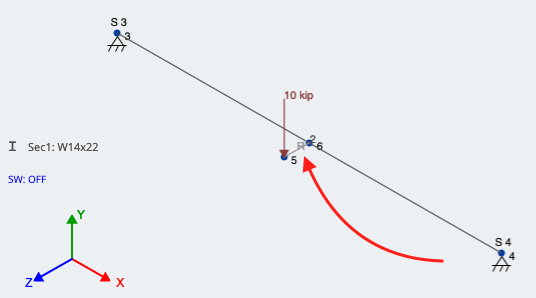
figura 4: Utilizzo di un collegamento rigido per tenere conto dell'eccentricità di un carico puntuale
Confronto finale e analisi:
Eseguiamo un'analisi statica lineare e osserviamo i risultati. Dovremmo vedere la forza discendente di 10 kip oltre a un componente torsionale nel punto di carico. Tutti e due
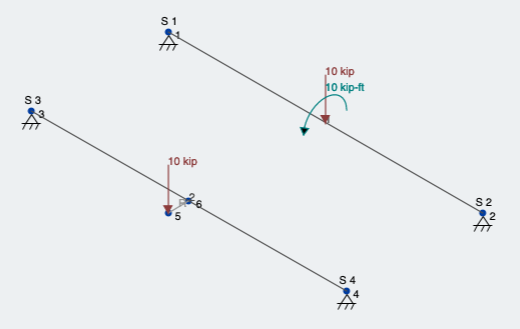
figura 5: Entrambe le condizioni di carico per carico eccentrico
Primo, diamo un'occhiata alla reazione e ai risultati del momento (figura 6):
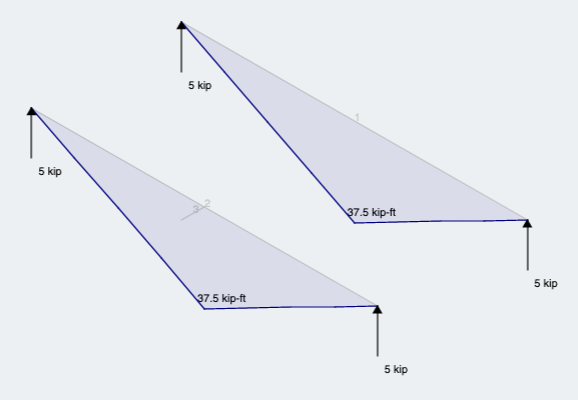
figura 6: Reazioni e risultati Momento per entrambi i metodi
Come previsto, vediamo cosa ci aspetteremmo dallo stesso carico di entità e posizione lungo l'asta, ma attraverso il baricentro.
Successivamente, per l'eccentricità, possiamo osservare che entrambi i membri danno lo stesso risultato e mostrano che il membro lo è ANCHE sperimentando la torsione (figura 7):
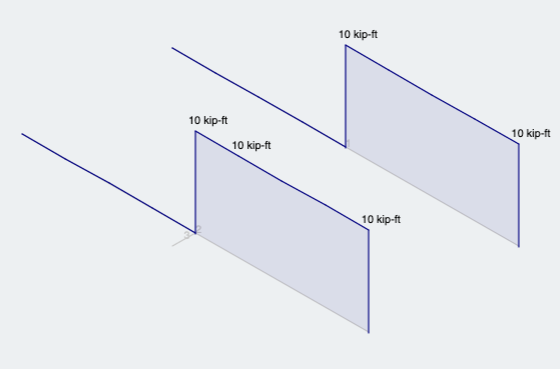
figura 7: Risultati dell'analisi di torsione per entrambi i metodi

Ingegnere strutturale
BEng (Civile)