铰链连接以及如何在Structure 3D中建模的指南
什么是铰链接头?
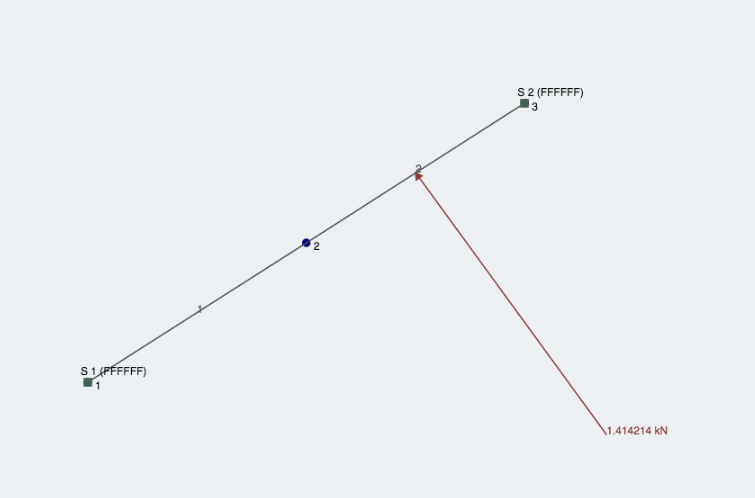
首先, 什么是铰链接头? 铰链连接允许两个成员绕其连接旋转. 在铰链处, 两个成员都可以不受限制地自由旋转. 如下图:
您可以看到第二个成员如何在施加的载荷下自由旋转. 该构件未将任何弯矩传递给另一个构件. 有一个事实证明了这一点 0 连接节点的弯矩, 意味着对弯矩没有约束.
了解铰链连接
全面了解连接方式的最佳方法是了解连接方式。 节点连接到成员端. 如果它具有固定的自由度, 然后将构件焊接到节点 – 节点去哪里, 成员去! 接受以下两个成员:
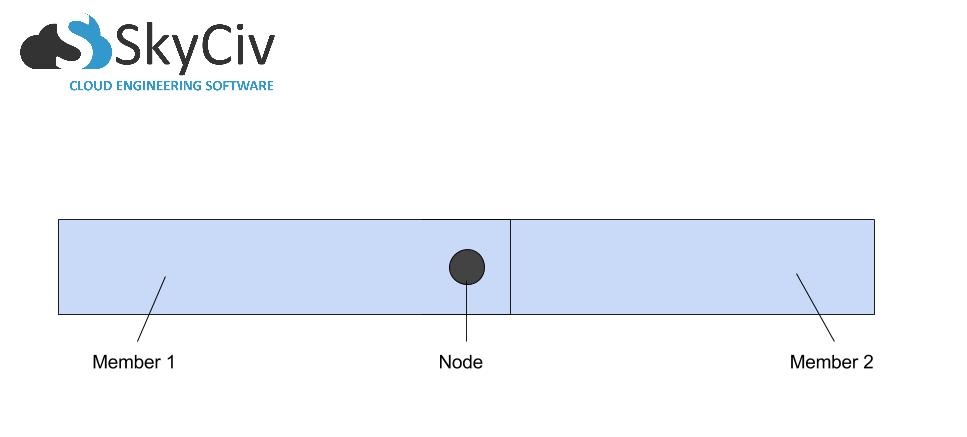
我们可以看到它们由一个公共节点连接. 现在,让我们分开成员来仔细看看:
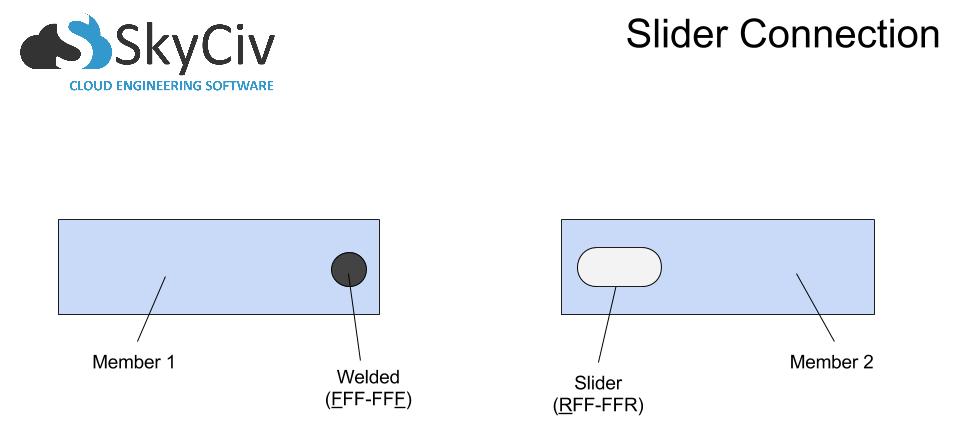
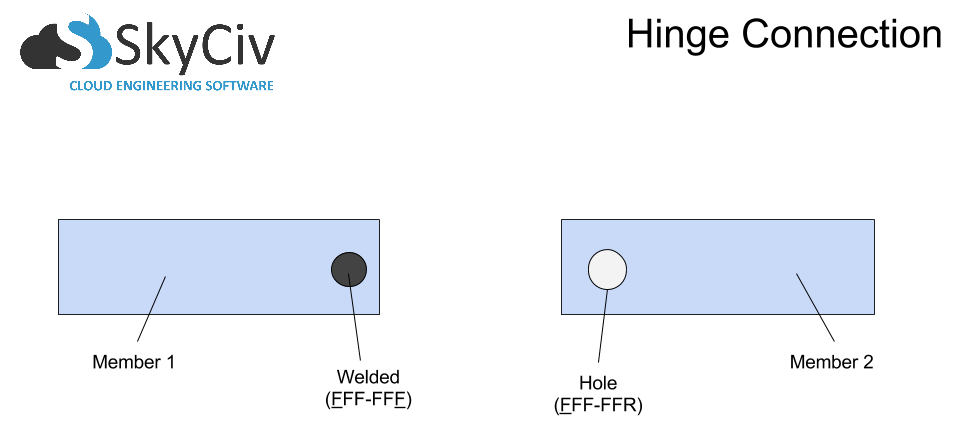
在左边, 我们有会员 1, 用约束代码FFF-FFF固定到节点. 在右边, 我们有会员 2, 在此示例中,该孔上切有一个孔,该孔允许节点沿X滑动并绕Z旋转. 用RFF-FFR表示. 我选择此示例是因为它易于理解和可视化沿X轴的运动. 这是可以在X轴上平移的铰链接头的示例. 如果要限制沿局部x轴的移动, 只需对以下连接建模:
如何为铰链接头建模
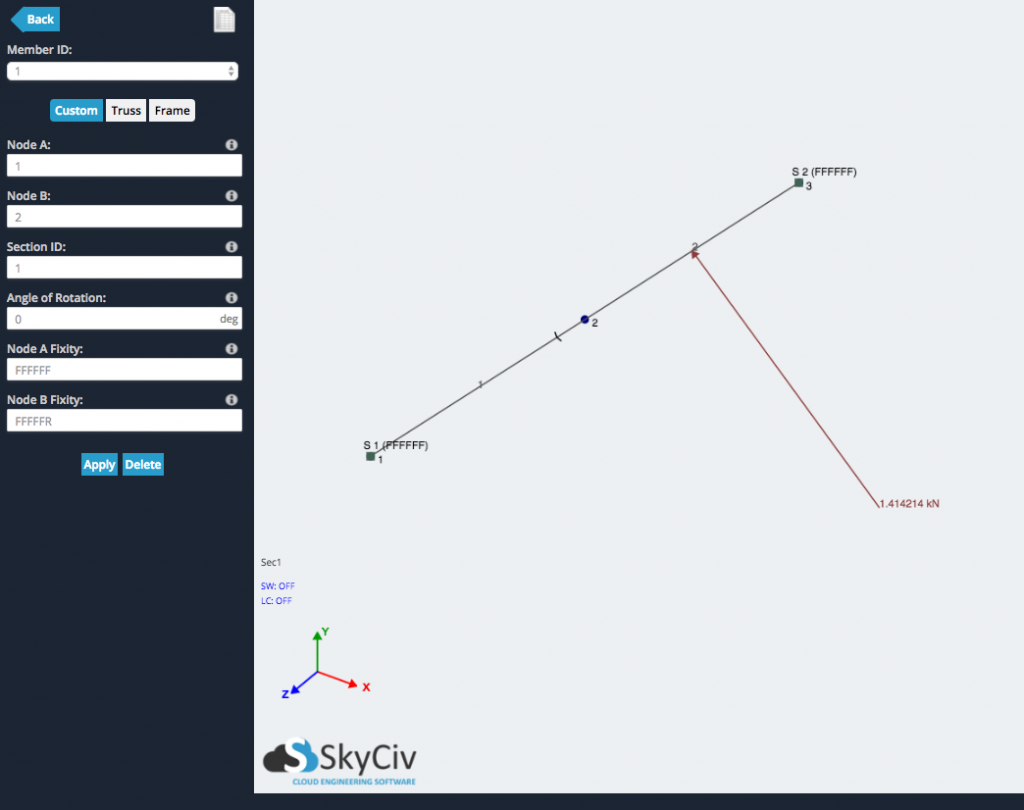
一旦我们了解了最终解决方案, 是时候在软件中对此建模了. 在两个成员之间建立简单的联系:
更改此连接 (节点 2 在图中) 到铰链接头, 我们只需要将成员固定之一更改为FFF-FFR (如下所示). 我们可以看到成员1的结尾用'FFFFFR表示’ 在左侧的输入菜单中. 在这样做, 我们应该看到一点“破折号”’ 添加到图中, 表示该成员不再是固定连接:
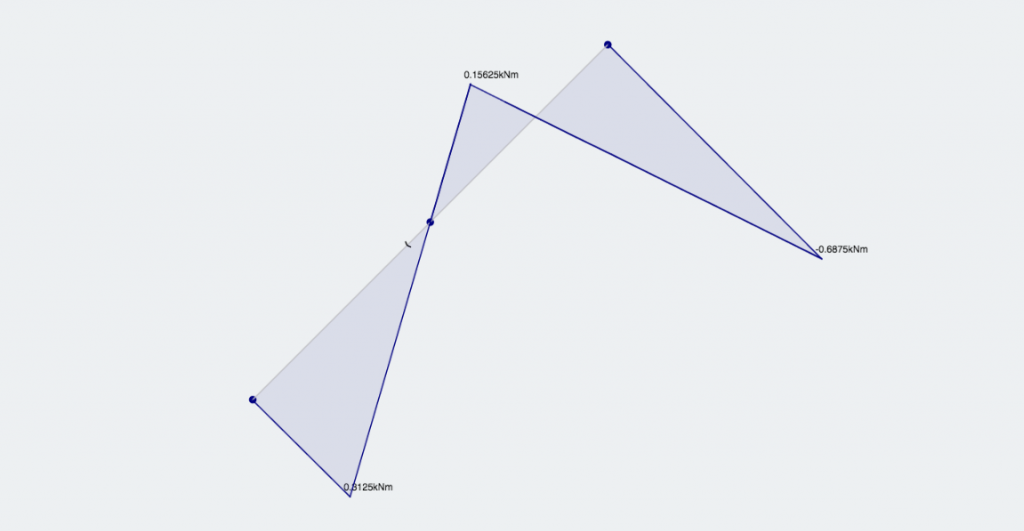
在我们分析结构之后, 我们可以检查连接处是否有弯矩力. 由于弯曲力没有在构件之间传递, 应该有 0 铰链所在节点的弯矩:
资源: 如何在SkyCiv中建模铰链