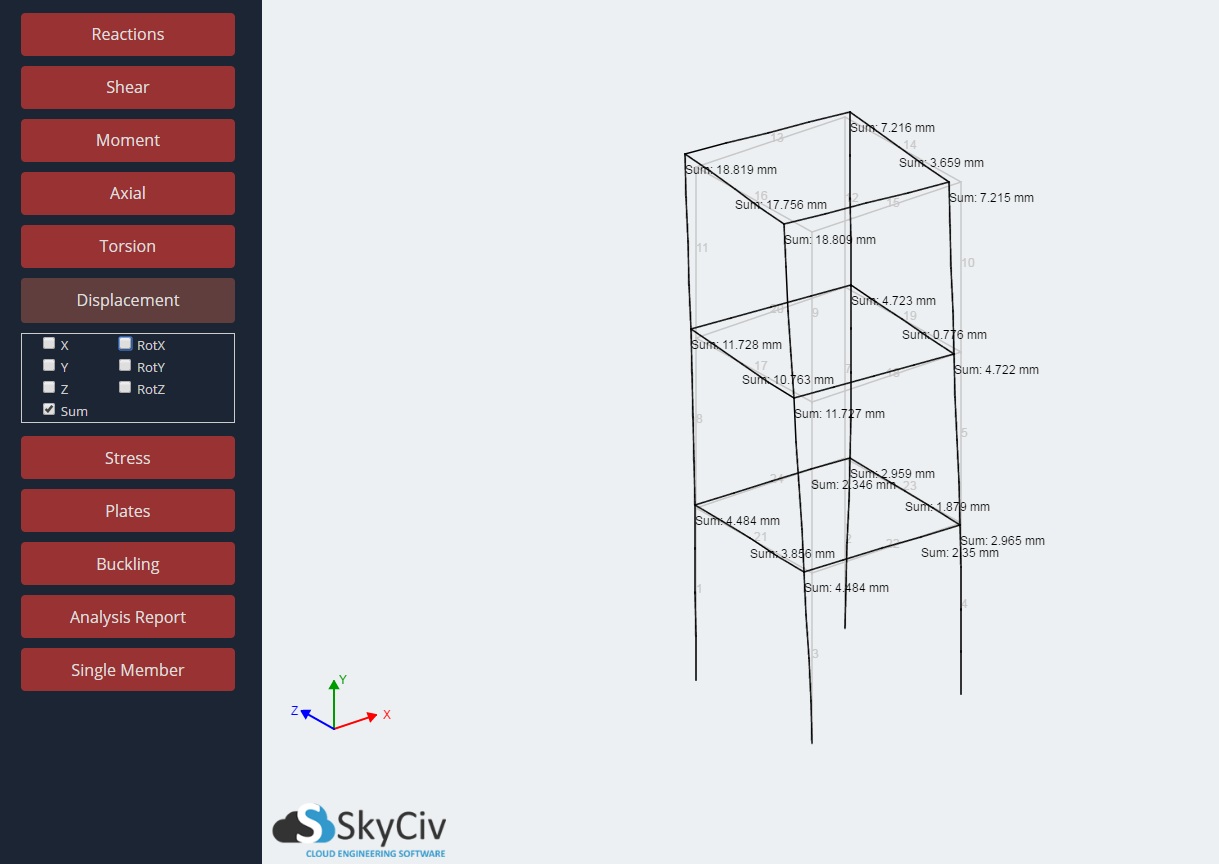
显示结构每个成员的单成员位移值. 位移值显示在每个成员的开始和结束节点. 可以使用复选框打开和关闭距离和旋转位移值. 这些值被分成组件全局 X, 和, 和 Z 值 (或距离位移总和).
注意, 与其他显示选项一样, 显示的内容取决于左侧下拉菜单中选择的负载组合/包络. 可以拖动位移标签以提高清晰度. 您可以通过旋转或拖动结构来重置标签的位置.
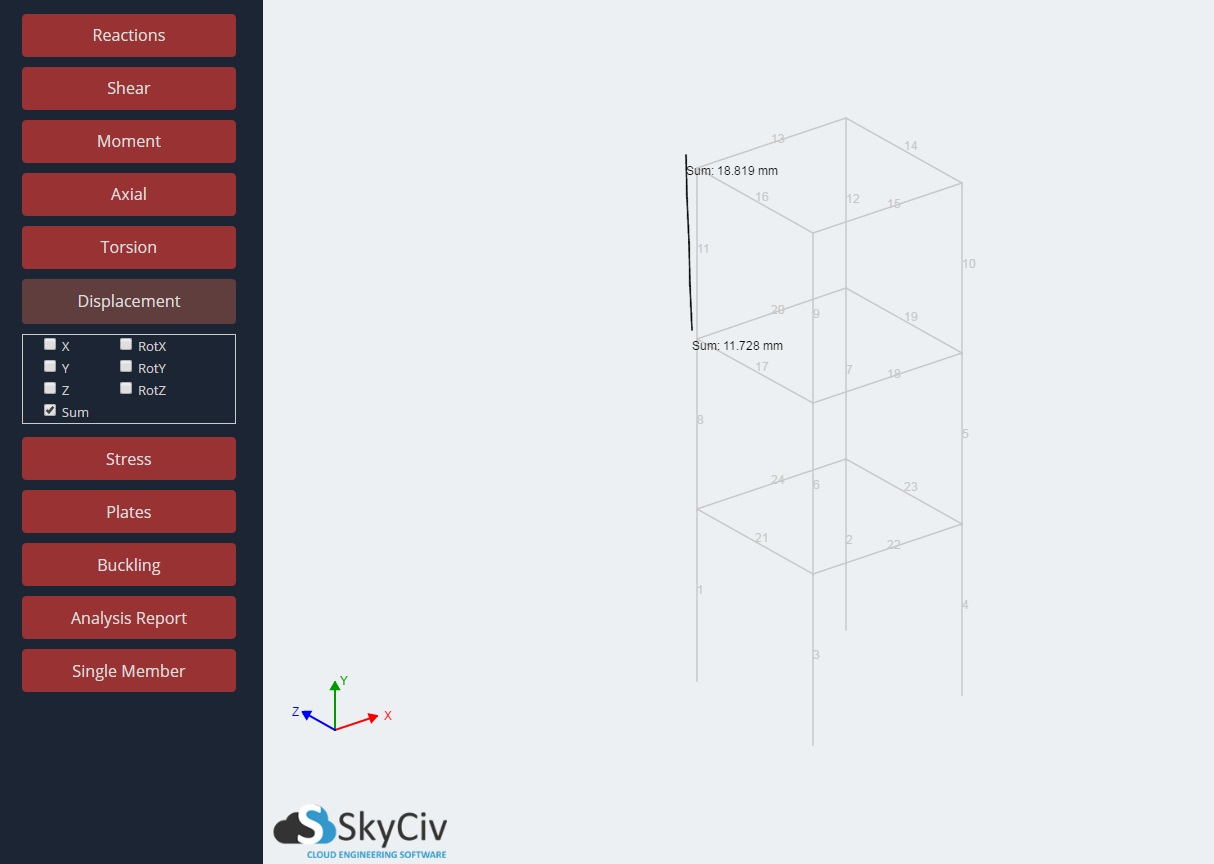
例如, 打开位移结果, 线框将始终显示模型的位移形状. 您可以打开和关闭位移结果的任意组合,如图所示:
缩放和动画偏转
缩放或动画化结构的变形通常有助于查看结果或识别模型中的问题. 例如, 在对结构的偏转进行动画处理时,识别断开的成员要容易得多:
为您的偏转设置动画, 只需滚动垂直滑块 (在屏幕的右侧) 上下. 或者干脆, 持有 “小号” 键并滚动鼠标 (S代表 规模).
L/挠度比结果
这个常用比率有助于为用户提供用于偏转限制的快速比率. 了解软件如何计算这些值很重要,这样工程师才能正确解释结果. 该结果通常表示为 L/xx. 如果值, xx, 低于某个标准 (例如 250) 它被认为不符合该标准. 进行更准确的分析和检查, SkyCiv 执行两个偏转/跨度计算:
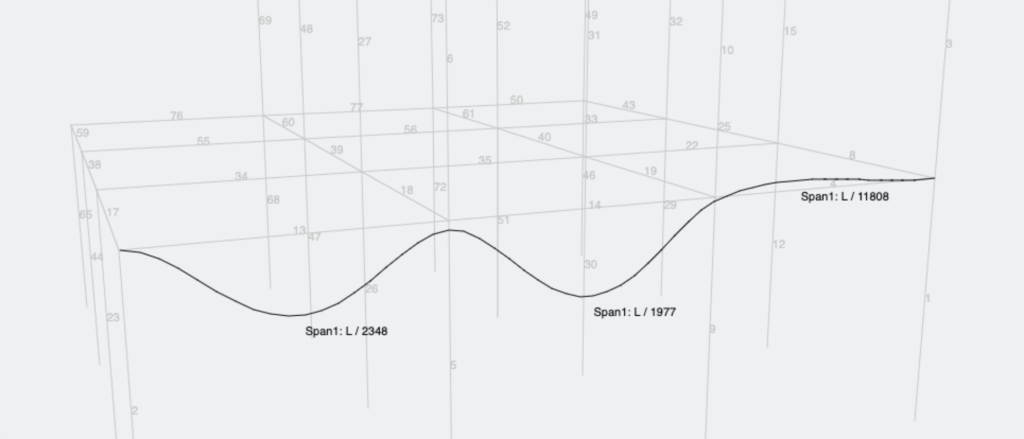
跨度通过方法 1: 对于连续成员, 它假定沿成员的每个节点/连接都充当约束或支撑.
跨度通过方法 2: 对于连续成员, 无论沿成员的节点/连接如何,跨度都会占据成员的整个长度.
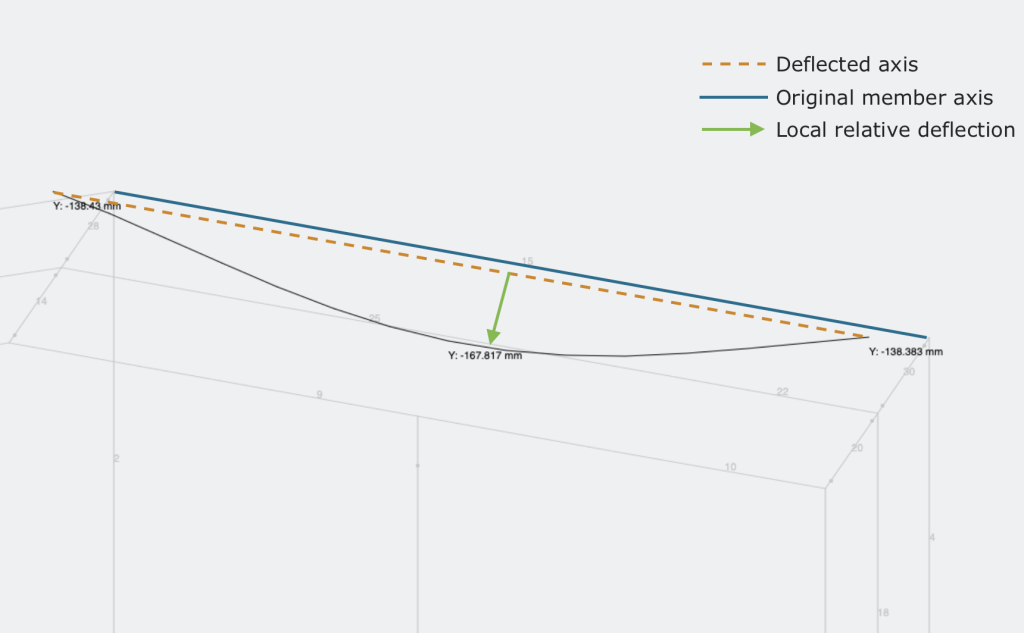
对于这两种方法, SkyCiv 计算分母 (xx 值) 这个结果通过将成员的长度除以成员的 当地的 相对偏转. 的 当地的 相对成员偏差 是从构件偏转形状两端之间的线的偏转:
通过使用这两种方法, SkyCiv 可以识别并正确计算不同场景下的控制挠度比. 例如:
例 1: 会员 30 有克制 (通过连接的成员) 在中点, 所以跨度 1 比较合适,应该考虑:
例 2: 底部成员有连接的成员, 但不提供任何限制. 所以跨度 2 更适合和治理. 下图简单解释了跨度比的差异:
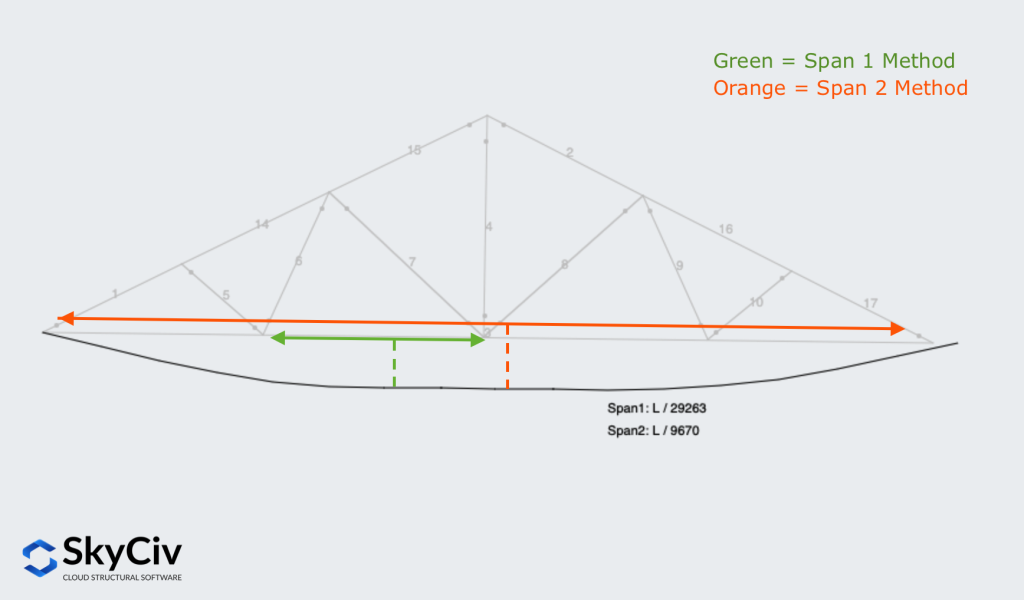
考虑这两种情况很重要, 因为如果我们看一下传统的挠度跨度比 (只是在两个成员之间), 我们可能会错过整个桁架的整体偏转, 这在 跨度 2 C3.1.2.1-6.
详细的挠度比示例
在结构3D中, 我们通过确定垂直于位移构件轴的偏转来计算用户的偏转比, 并将其与构件的位移长度进行比较. 这是 局部相对挠度 如上节所定义.
图表上的绿线表示构件相对于位移的构件轴的偏转. 这就是 S3D 用来确定 d / L值. 我们可以使用这些值向后计算这个偏转比 (还使用 SkyCiv 中的单成员分析功能):
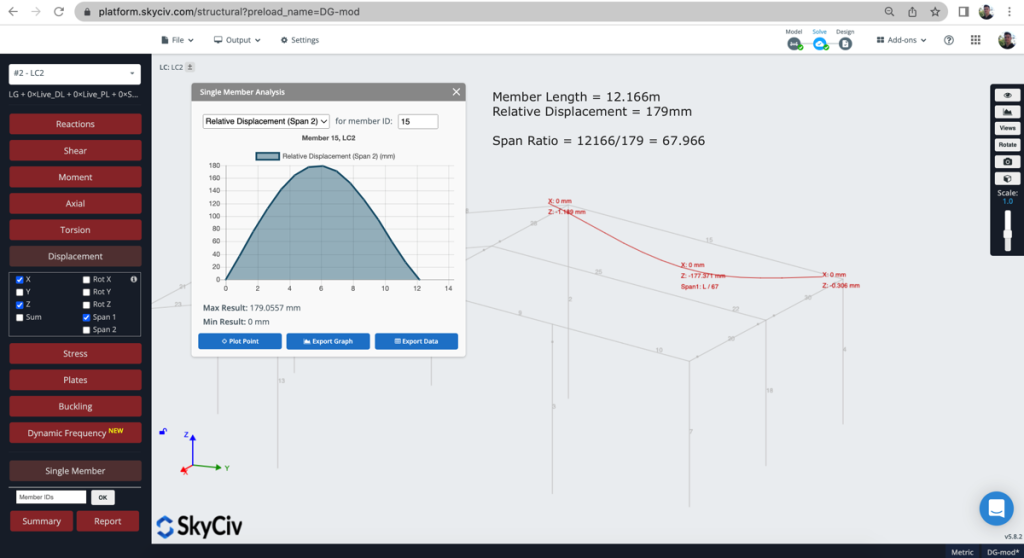
成员长度: 12.166米
相对位移: 179毫米
12166 / 179 = 67.96
因此挠度比为 1 / 67 (表示为 L/67).
注意: 软件将自动向下舍入到最接近的整数以进行保守.
悬臂挠度
计算悬臂的相对位移通常很困难,, 在实践中, 信息不多. 工程师通常关心绝对尖端位移, 因为这决定了可维护性和用户对偏转的感知. 为此原因, 当 SkyCiv 将成员识别为悬臂梁时, 它将绝对位移值分配给相对位移场.
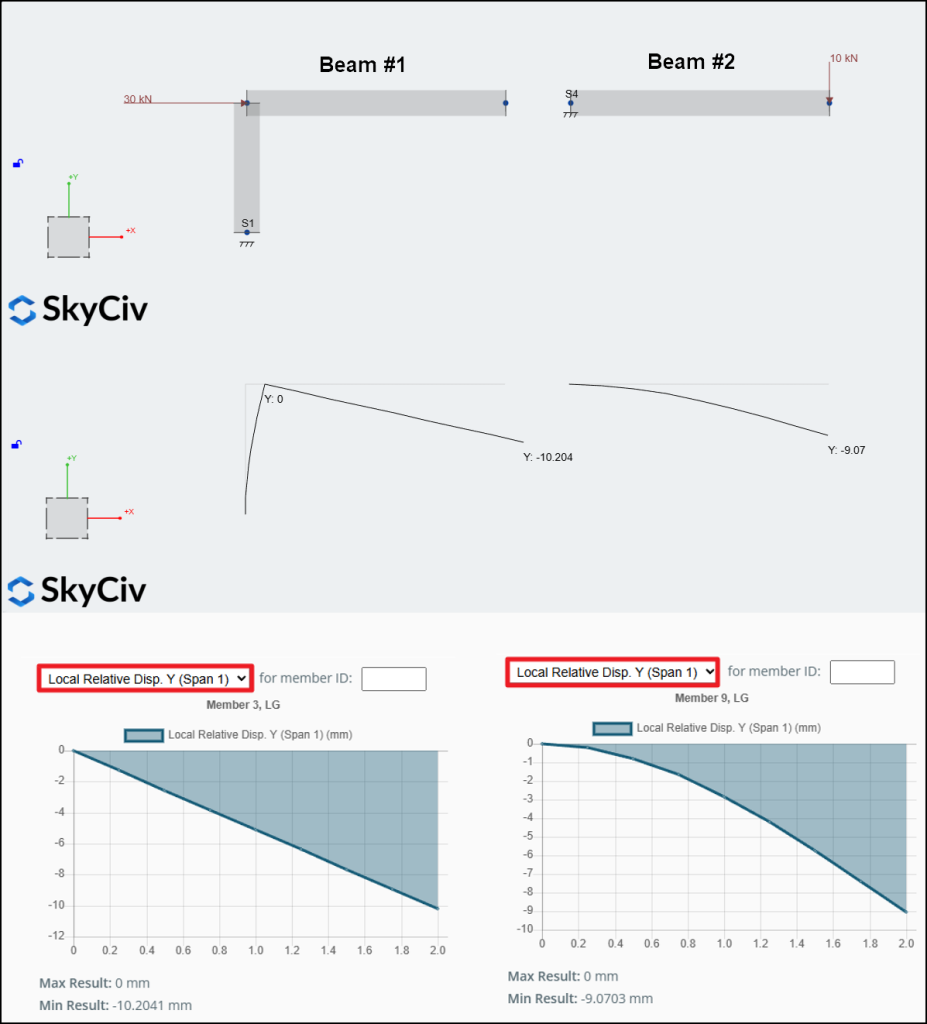
下图说明了这个概念:
- 光束 #1: 尖端位移主要由刚体运动引起, 不是通过内应力. 理论上, 这应该给出相对位移 0 毫米 和绝对位移 10.2 毫米. 然而, 因为该成员被检测为悬臂梁, SkyCiv 报告的相对位移为 10.2 毫米 在尖端.
- 光束 #2: SkyCiv 符合理论行为. 构件的内部弯曲产生尖端位移 9.07 毫米, 相对值和绝对值相同.
调整悬臂的相对位移以匹配绝对位移,以便进行适用性检查, 检查跨度与偏转比与相对位移的关系, 在这两种情况下都保持准确.
自动悬臂检测
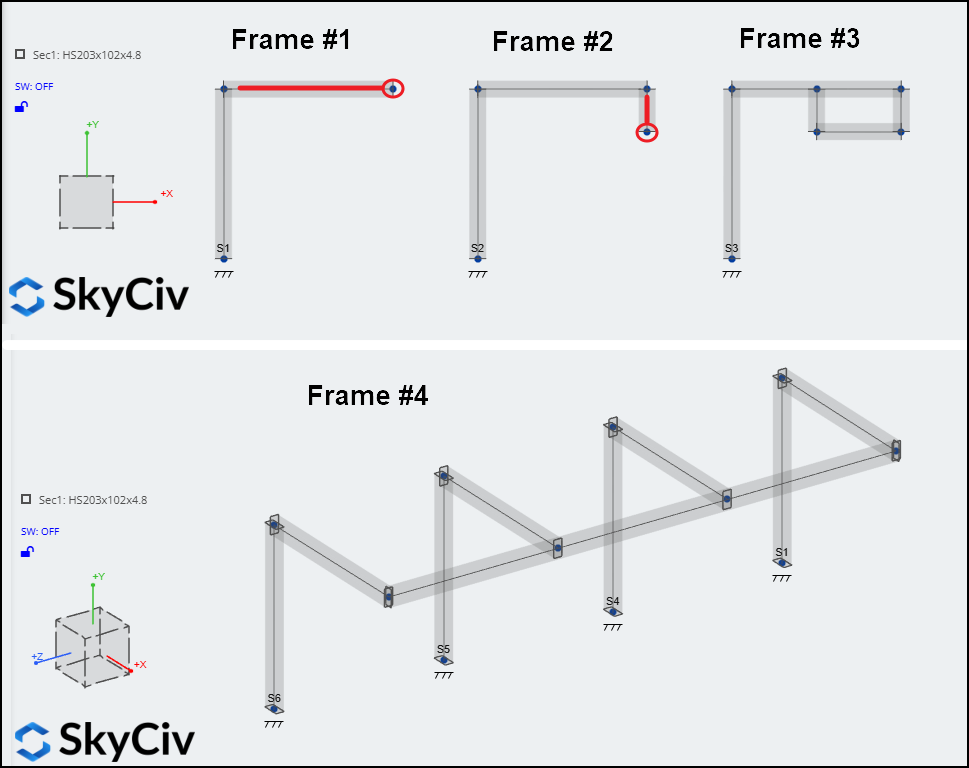
SkyCiv中的悬臂检测算法非常简单: 如果一个成员有自由端且没有连接其他成员, 它将被视为悬臂. 在处理更复杂的布置(其中附加构件连接到悬臂构件的自由端)时,用户应检查偏转限制. 在下面的例子中, 自由尖端和悬臂构件显示为红色:
- 框架 1: 仅水平梁被自动检测为悬臂梁, 尽管有些人可能会认为该列的行为也像一个.
- 框架 2: 梁和柱均未检测到, 但悬挂的构件被认为是悬臂.
- 框架 3: 未检测到悬臂构件.
- 框架 4: 未检测到悬臂构件.
如前所述, 在所有四种情况下, 用户在解释结果时必须谨慎.