So kompensieren Sie, Übersetzen oder fügen Sie Einfügepunkte zu einem Mitglied in SkyCiv Structural 3D hinzu
Bei Elementversätzen handelt es sich um kleine Verschiebungen der Position eines Elements zu einem Ort, der näher an seiner Darstellung in der realen Welt liegt.
Standardmäßig, Die S3D-Software von SkyCiv verbindet Mitglieder Knoten für Knoten. Die eindimensionale Linie, die jedes Element zwischen seinen Endknoten darstellt, befindet sich im Schwerpunkt des Querschnitts.
Ästhetisch, Dieses Standardverhalten führt zu einer Überlappung einiger Elemente, die realistischerweise nicht auftreten könnte. Zusätzlich, In realen Strukturen können kleine Momente oder Kräfte vorhanden sein, da die angrenzenden Elemente nicht wirklich mit Schwerpunkt an Schwerpunkt verbunden sind. Daher werden Mitgliedsoffsets verwendet, um diese Probleme zu beheben.
Offset-Achse
Elementversätze werden durch eine Eingabe mit drei Zeichenfolgen definiert, die den Versatzabstand in jeder Achsenrichtung darstellt: [x-Achse, y-Achse, Z-Achse]. Dies gibt an, dass die Elemente um einen angegebenen Wert in Millimetern versetzt sind (Zoll, wenn Sie Imperial verwenden) in Richtung der bezeichneten lokalen Achse. Mit der lokale Achse muss für den Versatzbefehl verwendet werden, da innerhalb eines dreidimensionalen Raums Verwirrung entstehen kann, wenn sich zwei Elemente auf zwei völlig unterschiedlichen Ebenen befinden. Gitter Gitter können aktiviert werden, um Referenzlinien überall im Modell anzuzeigen.
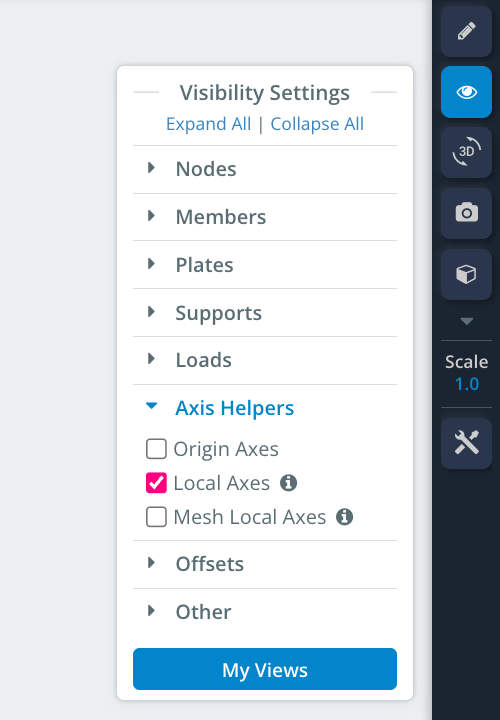
Die lokale Achse des Elements kann in der Drahtgitteransicht angezeigt werden, indem Sie in die Sichtbarkeitseinstellungen gehen und diese wie unten gezeigt aktivieren:
Ein Mitglied verrechnen
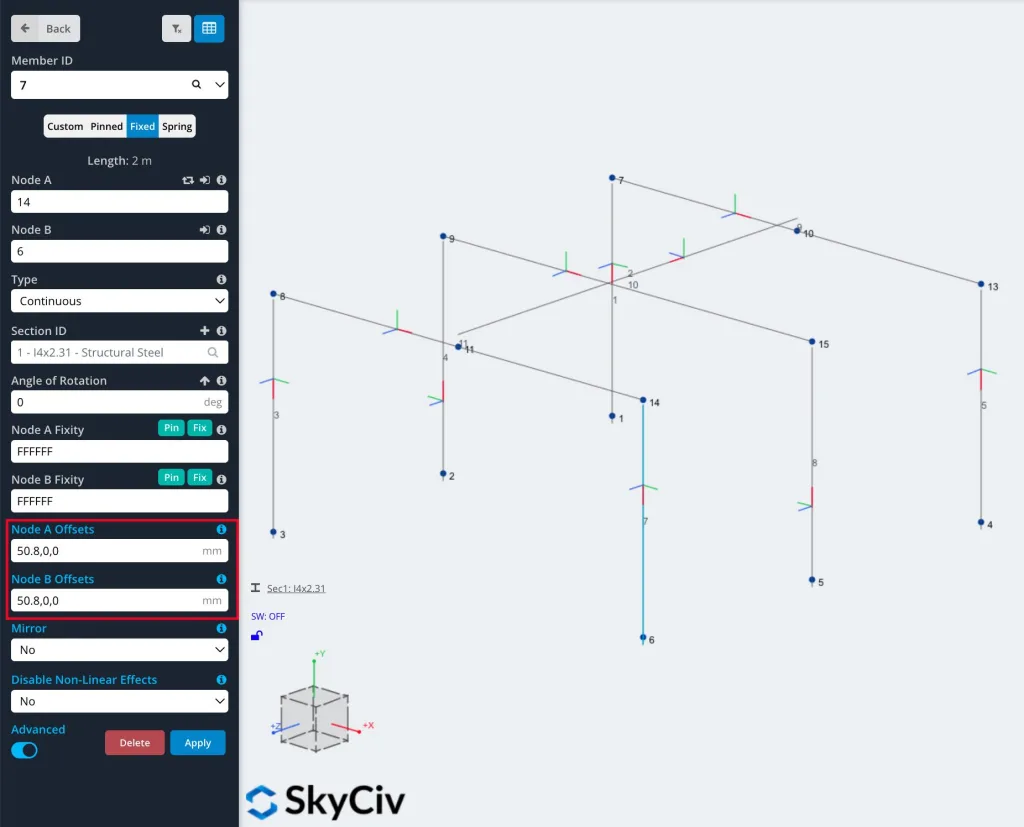
Ein Element kann versetzt werden, indem Sie auf das Element klicken und den Wert des Versatzes in den entsprechenden Achsenabschnitt des Folgenden eingeben [x-Achse, y-Achse, Z-Achse], ursprünglich eingestellt als [0,0,0] aufgrund des fehlenden Anfangsausgleichs. Durch die Verwendung einer negativen Zahl wird das Element als lokale Achse in die negative Richtung versetzt.
Zugriff auf die Offset-Optionen, Stellen Sie sicher, dass Sie die Option aktiviert haben “Fortgeschrittene” in die Ein-Position schalten.
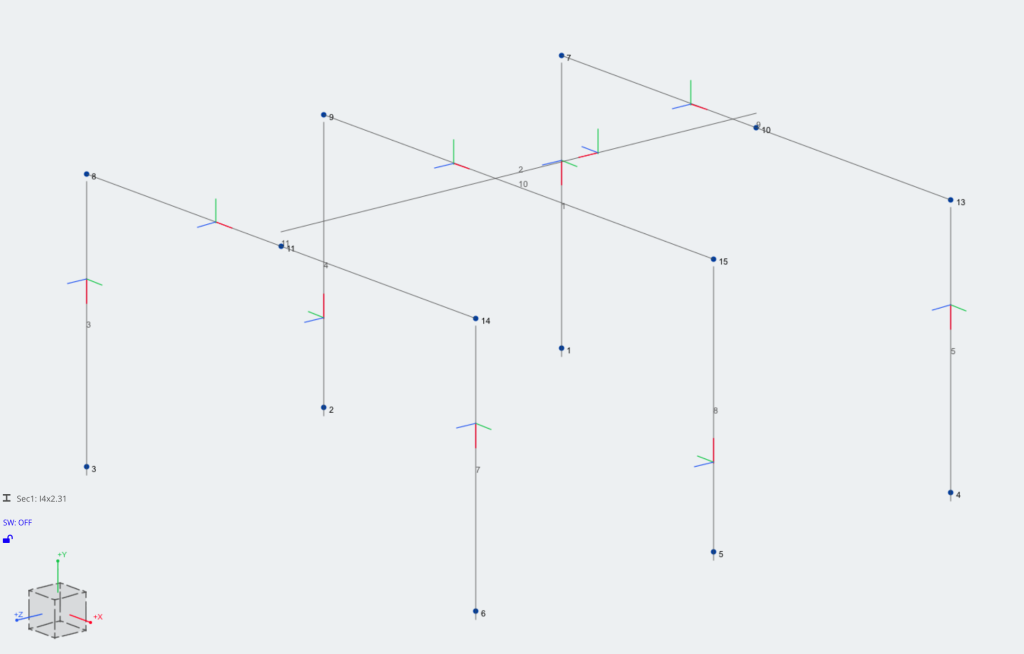
Unten sehen Sie ein Beispiel für einen Rahmen ohne Elementversätze. Beachten Sie, dass Versätze zu einem Element an einem einzelnen Ende oder an beiden Enden vorgenommen werden können.

Oben sehen Sie, dass sich die Ecken der Rahmenelemente überlappen und dass die Pfette im Rahmensparren und nicht oben sitzt.
Unten ist derselbe Rahmen dargestellt, jedoch unter Verwendung von Elementversätzen:

Sie können oben sehen, dass die Sparren jetzt auf den Säulen sitzen und nicht in ihnen, und das Gleiche gilt für die Pfetten auf den Sparren.
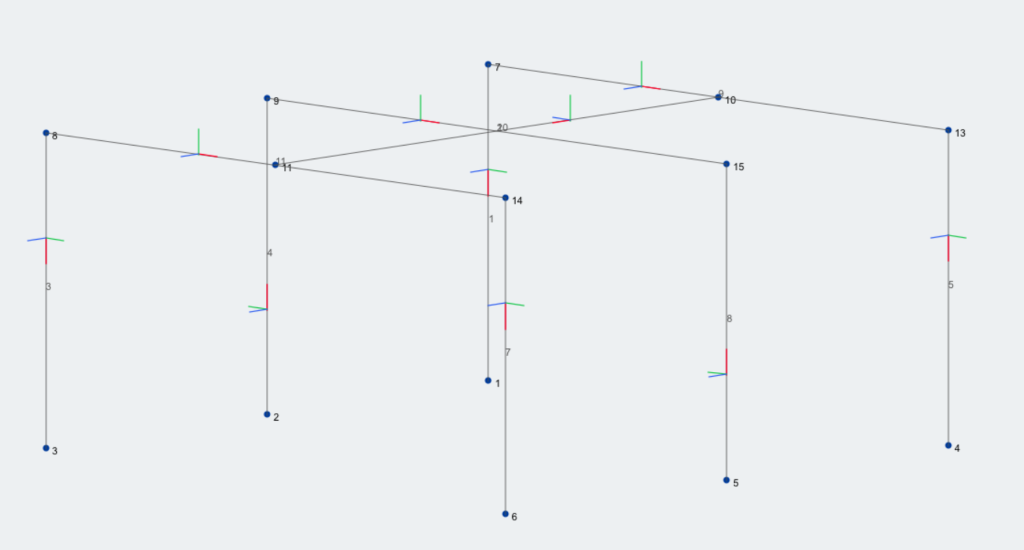
Unten ist derselbe Rahmen dargestellt, jedoch in der verdrahteten Rahmenansicht:
Wie funktionieren Offsets??
Es entstehen Versätze “Platz” zwischen einem Mitglied und seinem Knoten, aber immer noch mit dem Knoten verbunden. Es ist durch ein Unsichtbares verbunden Starre Verbindung. Eine starre Verbindung ist eine imaginäre steife Verbindung, die den Knoten mit der Versatzposition des Elements verbindet, so dass sie Lasten perfekt übertragen, Auslenkung und Rotation zueinander.
Da die Mitglieder in ihren Mittelpunkten nicht mehr verbunden sind, Diese starre Verbindung erzeugt einen kleinen Hebelarm und wirkt sich daher auf die internen Elementkräfte des Elements aus. Es können zusätzliche Torsions- oder Biegemomentkräfte im Bauteil entstehen. Meistens sind diese Werte recht gering und können oft als vernachlässigbar angesehen werden.
Lesen Sie mehr über starre Links und deren Verhalten im Mitglied Dokumentation.
Beachten Sie dies bei der Verwendung von Offsets
Bei der Verwendung von Versätzen und starren Verbindungen ist Vorsicht geboten, um sicherzustellen, dass die Elemente weiterhin ordnungsgemäß verbunden sind. Zum Beispiel, wenn Sie eine starre Verbindung an einem FFFRRR-Träger anbringen (Die feste Übersetzung erfolgt in alle Richtungen – frei in alle Richtungen drehbar), Sie könnten davon ausgehen, dass dieses Mitglied im X weiterhin unterstützt wird,UND,Z-Übersetzung. Jedoch, Die starre Verbindung ist technisch gesehen frei drehbar und die Kräfte werden möglicherweise nicht wie vorgesehen übertragen:
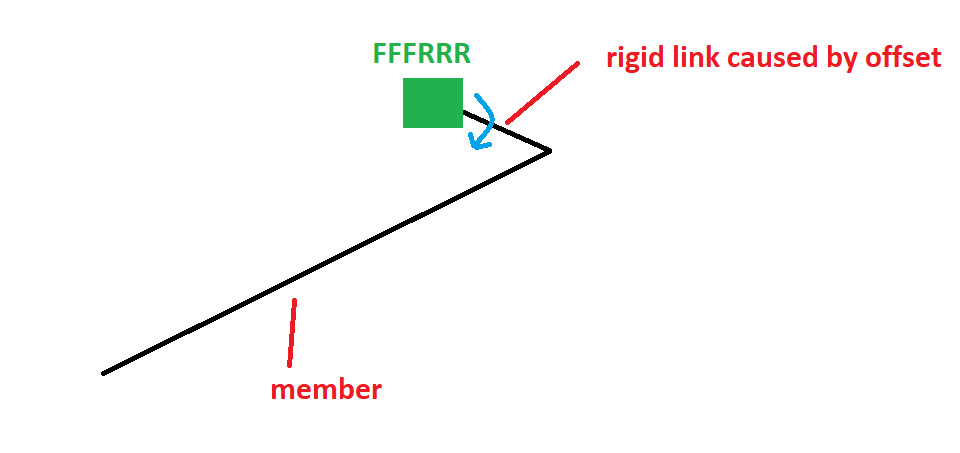
(Hinweis: In diesem Fall könnte eine korrekte Einrichtung eine vollständig feste Stütze und dann FFFRRR am Ende des Elements sein, um das starre Element am Drehen zu hindern)
Einfügepunkte
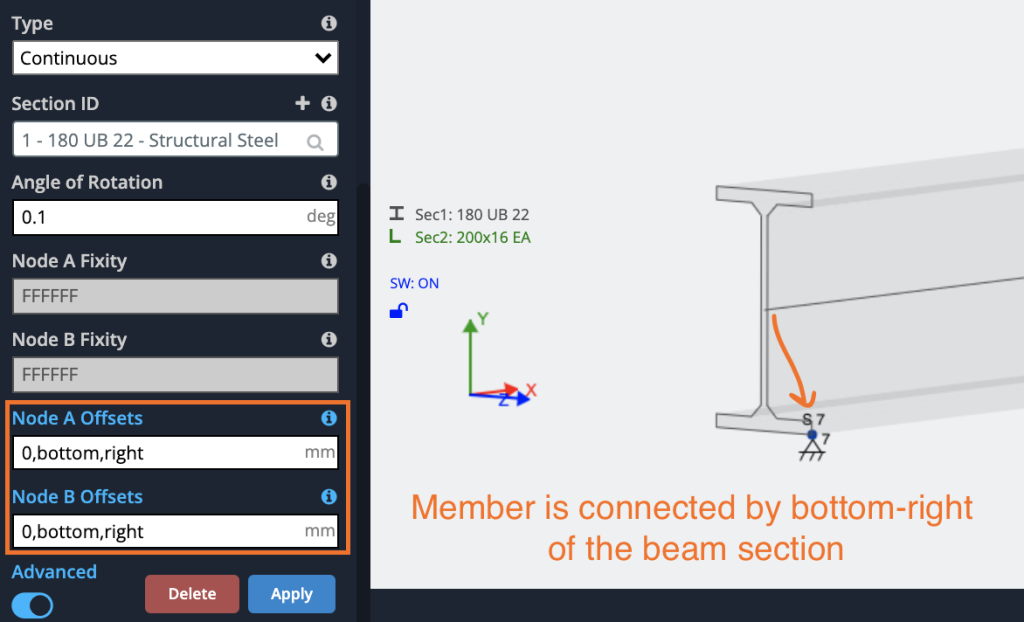
Einfügepunkte sind eine gängige Methode, um die Positionierung der Verbindung zu einem Mitglied zu steuern. Standardmäßig, Das Element wird über seinen Schwerpunkt mit anderen Elementen verbunden. Mit Einfügepunkten, Sie können dies auf andere wichtige Punkte des Abschnitts verschieben. Einfügepunkte basieren auf der gleichen Funktionalität wie Offsets, um die Genauigkeit der Software mit einer sauberen und einfachen Benutzererfahrung in Einklang zu bringen.
Einfügepunkte lassen sich mithilfe von Elementversätzen einfach steuern:
Einfügepunkte können wie folgt definiert werden:
- Erster Eingang – Nur Nummer
- Zweiter Eintrag – oben, Unterseite, Scherung oder Mitte
- Dritter Eintrag – richtig, links, Scherung oder Mitte
- Vierter Eintrag – (Optional) Durch Hinzufügen eines vierten Arguments as “vAusgabe”, Der Löser ignoriert die Offsets in der Analyse, und verwenden Sie sie nur in den Grafiken.
Durch die Kombination dieser Optionen, Benutzer können ihre Einfügepunkte an die gewünschte Stelle im Mitglied verschieben:
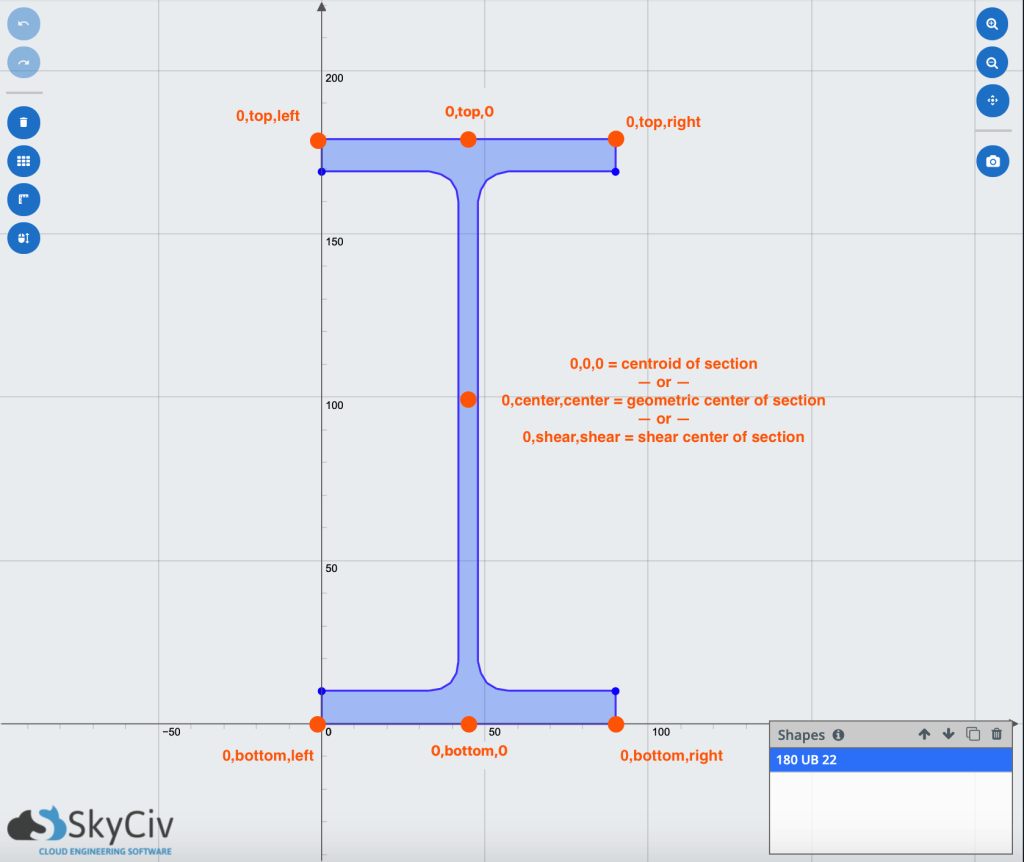
Einige häufige Einfügepunkte eines Balkens – Hinweis: Benutzer können die verschiedenen Eingaben kombinieren und anpassen
Einige gängige Beispiele:
| 0,oben,0 | Einfügepunkt bis zur Oberkante des Balkens |
| 0,oben,richtig | Einfügepunkt oben rechts am Balken |
| 0,Unterseite,links,visuell | Einfügepunkt unten links am Balken, Ignorieren Sie den Offset in der Analyse (Nur zur Visualisierung verwenden) |
| 0,Schub-,Schub- | Einfügepunkt zur Schnittmitte des Abschnitts |
| 0,0,richtig | Einfügepunkt im Schwerpunkt rechts vom Balken |
| 0,t,r | Einfügepunkt oben rechts am Balken |
Hinweis: für alle oben genannten Eingaben, Benutzer können als Abkürzung nur den ersten Buchstaben eingeben. Z.B. “0,t,l” wäre dasselbe wie eintreten “0, oben, links”
Die Auswirkungen von Einfügepunkten
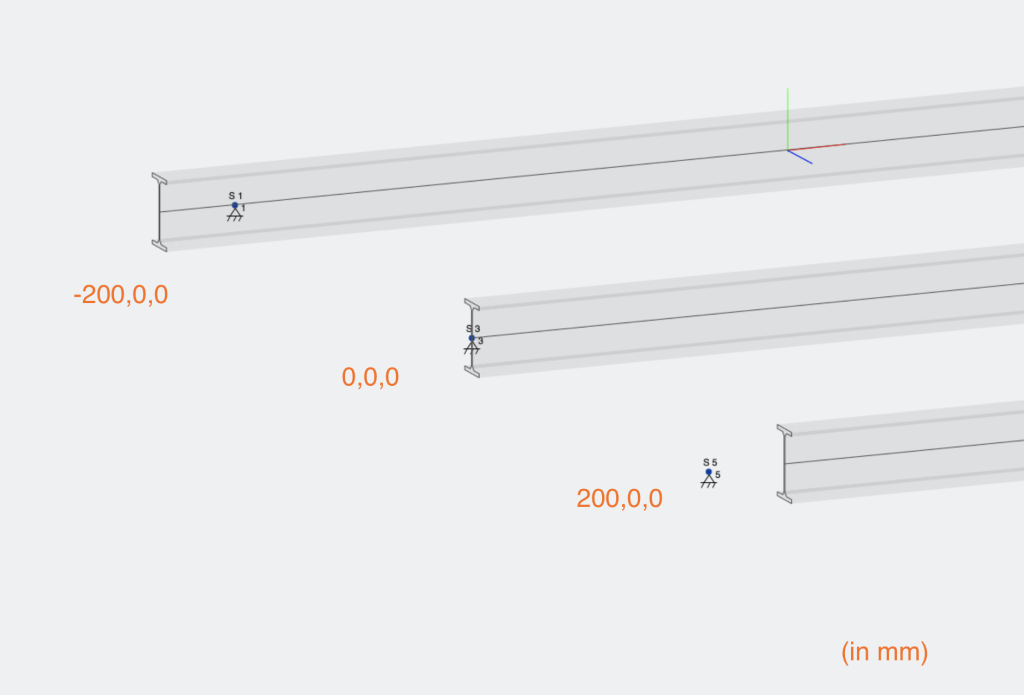
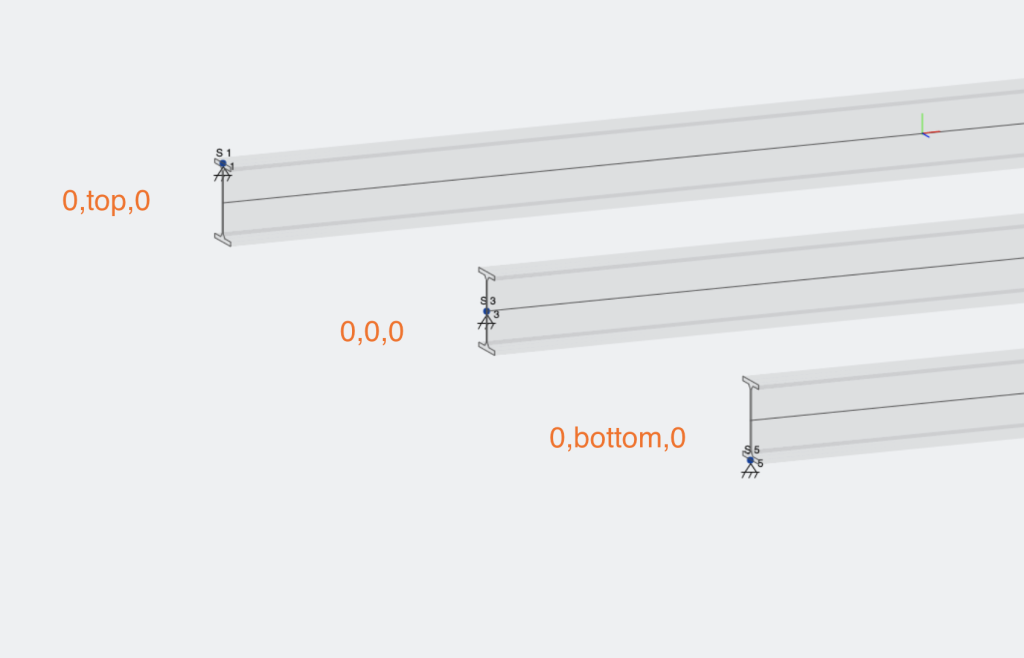
Nachfolgend finden Sie einige Beispiele für die Auswirkungen verschiedener Einfügepunkte. Durch Einfügen eines Einfügepunkts, An den Stabenden wird ein starres Element eingefügt, um die Lage des Schwerpunkts zu versetzen. Also im folgenden Beispiel, Wir haben drei mögliche Einfügepunkte:
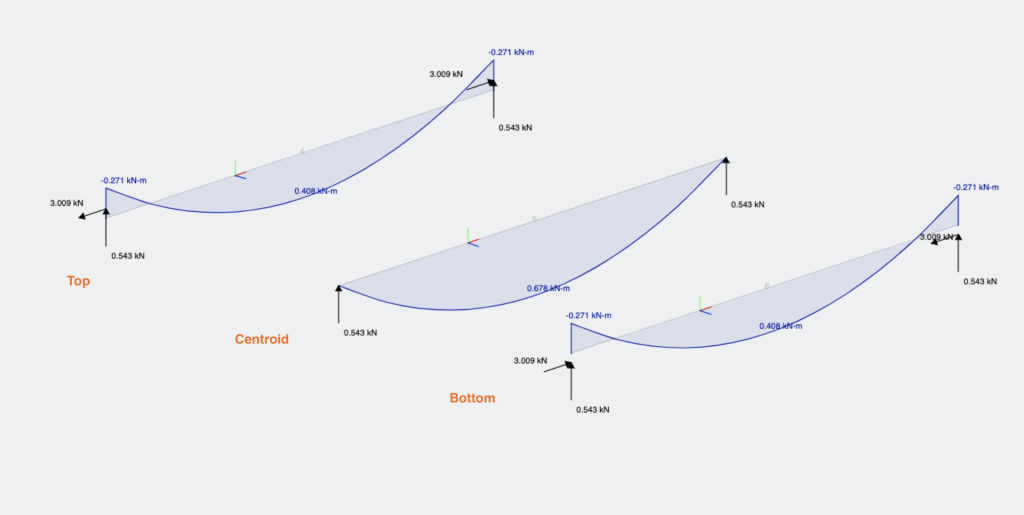
Die unterschiedlichen Einfügepunkte haben unterschiedliche Auswirkungen auf die Ablenkung, Reaktionen und Biegemomentdiagramme der Bauteile:
Einfügepunkte (Offsets) kann auch entlang eines Mitglieds existieren, indem als erste Eingabe eine Zahl eingegeben wird, hier sind 3 Beispiele dafür: