Como compensar, traduzir ou adicionar pontos de inserção a um membro no SkyCiv Structural 3D
As compensações de membros são pequenos deslocamentos da posição de um membro para um local mais próximo de sua representação no mundo real.
Por padrão, O software S3D do SkyCiv une membros nó a nó. A linha unidimensional que representa cada membro entre seus nós finais está localizada no centróide da seção transversal.
Esteticamente, este comportamento padrão cria uma sobreposição de alguns membros que realisticamente não poderia ocorrer. Além disso, pequenos momentos ou forças podem estar presentes em estruturas do mundo real devido aos membros adjacentes não estarem realmente unidos centróide a centróide. As compensações de membros são, portanto, usadas para corrigir esses problemas.
Eixo de deslocamento
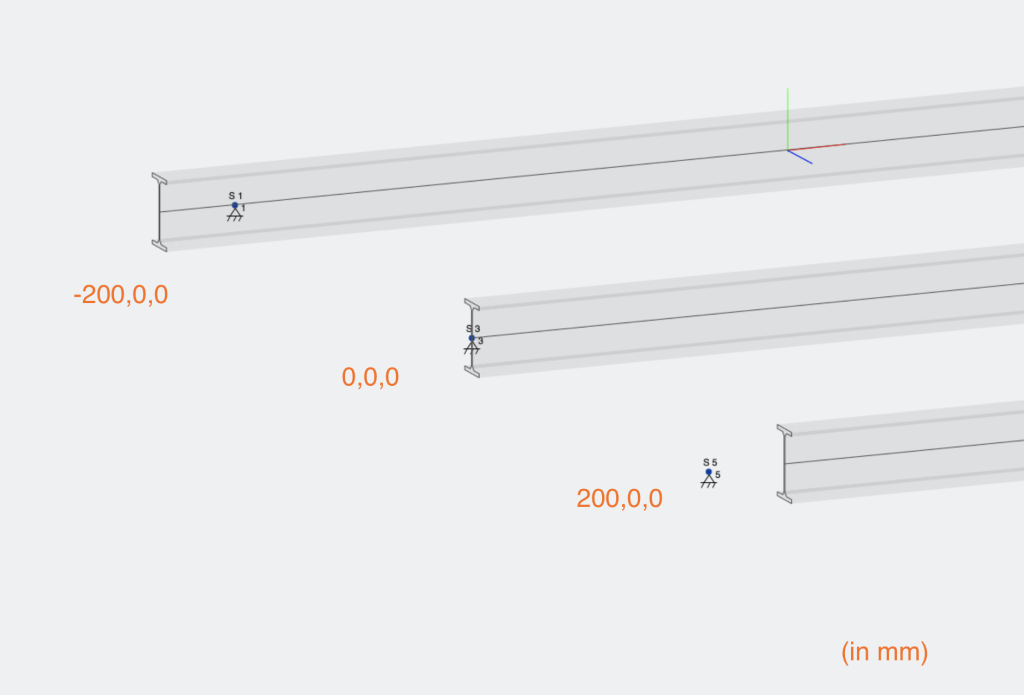
Os deslocamentos dos membros são definidos por uma entrada de três strings que representa a distância de deslocamento em cada direção do eixo: [eixo x, eixo y, eixo z]. Isto especifica que os membros são deslocados por um valor especificado de milímetros (polegadas se estiver usando Imperial) na direção do eixo local designado. A eixo local deve ser usado para o comando de deslocamento devido à confusão que pode surgir dentro de um espaço tridimensional quando dois membros estão em dois planos totalmente diferentes. Por exemplo, se um membro estiver na diagonal do eixo global, compensá-lo através de medições globais seria difícil e demorado.
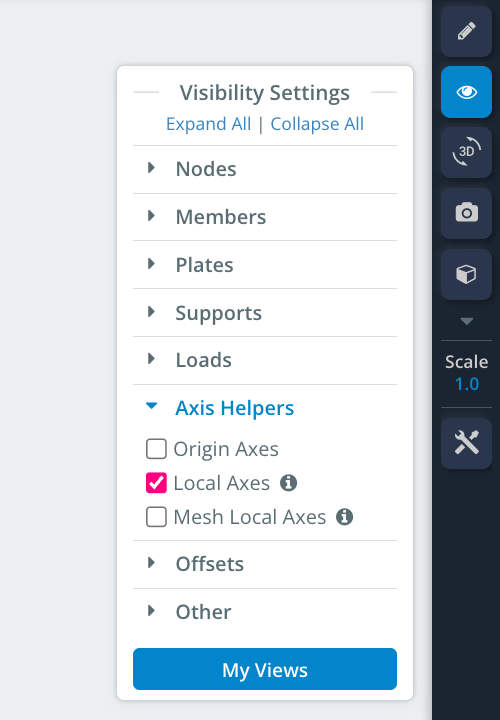
O eixo local do membro pode ser exibido na vista em estrutura de arame acessando as configurações de visibilidade e ativando-as conforme mostrado abaixo:
Compensando um membro
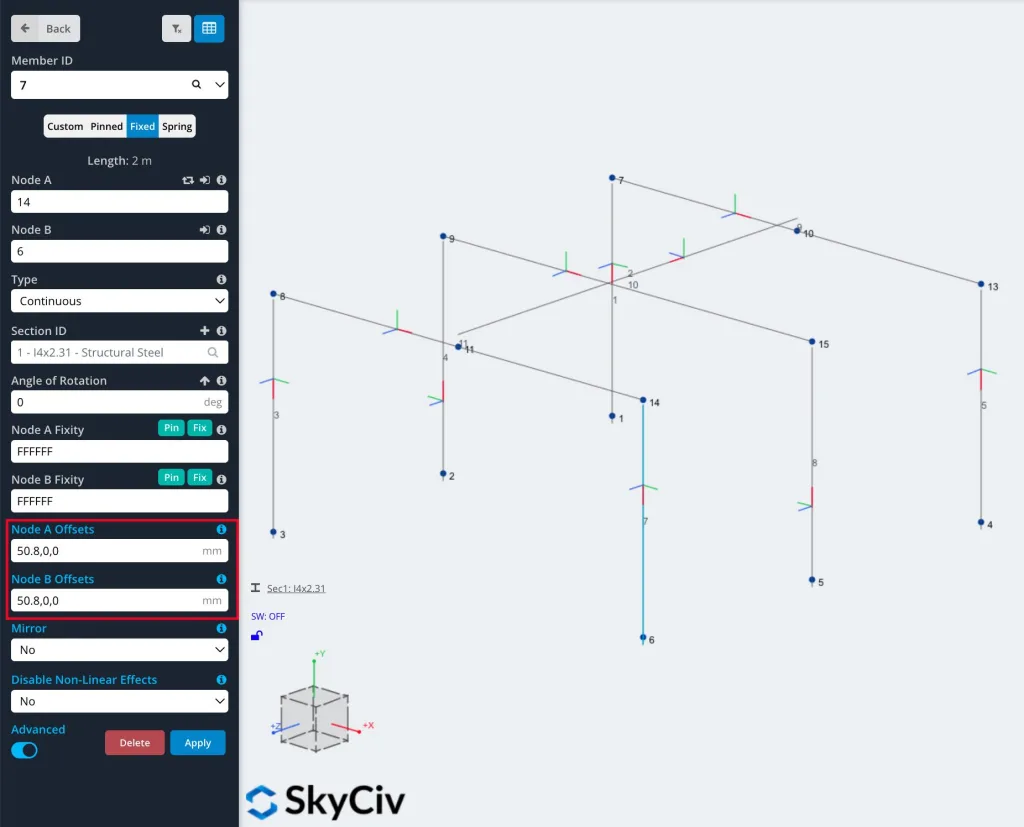
Um membro pode ser deslocado clicando no membro e inserindo o valor do deslocamento na seção do eixo correspondente do seguinte [eixo x, eixo y, eixo z], originalmente definido como [0,0,0] devido à falta de compensação inicial. Usar um número negativo irá deslocar o membro na direção negativa como o eixo local.
Para acessar as opções de deslocamento, certifique-se de ter alternado o “Avançado” mude para a posição ligada.
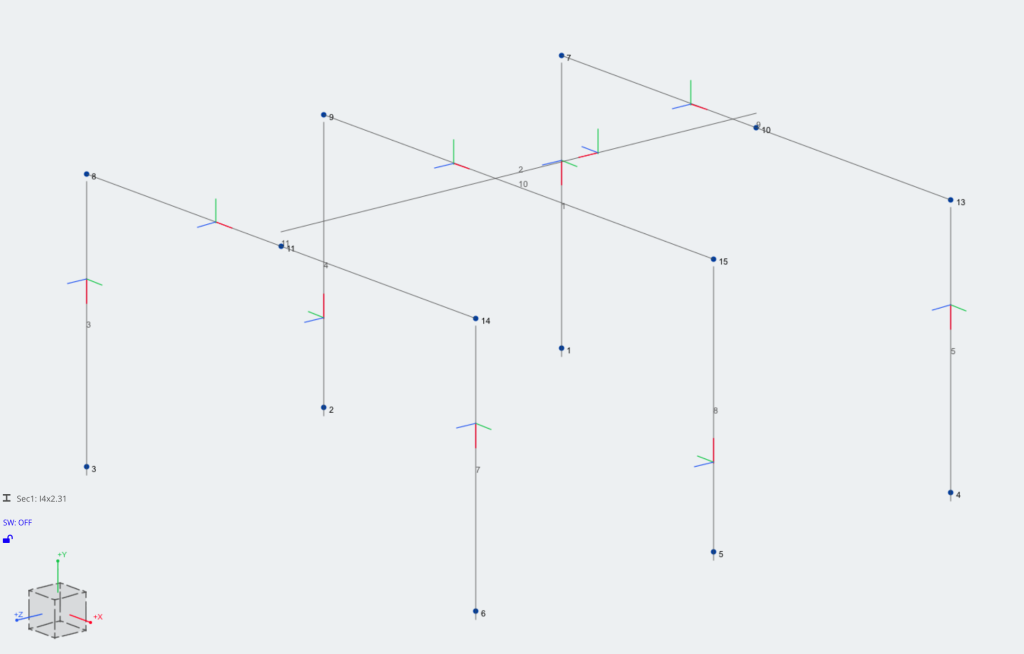
Abaixo é mostrado um exemplo de um quadro sem nenhum deslocamento de membro. Observe que os deslocamentos para um membro podem ser feitos em uma única extremidade ou em ambas as extremidades.

Você pode ver acima que os cantos dos membros da estrutura estão sobrepostos e que a madre está assentada dentro da viga da estrutura, e não no topo.
Abaixo é mostrado o mesmo quadro, mas com o uso de deslocamentos de membros:

Você pode ver acima que as vigas agora ficam no topo das colunas em vez de dentro delas e o mesmo acontece com as terças nas vigas.
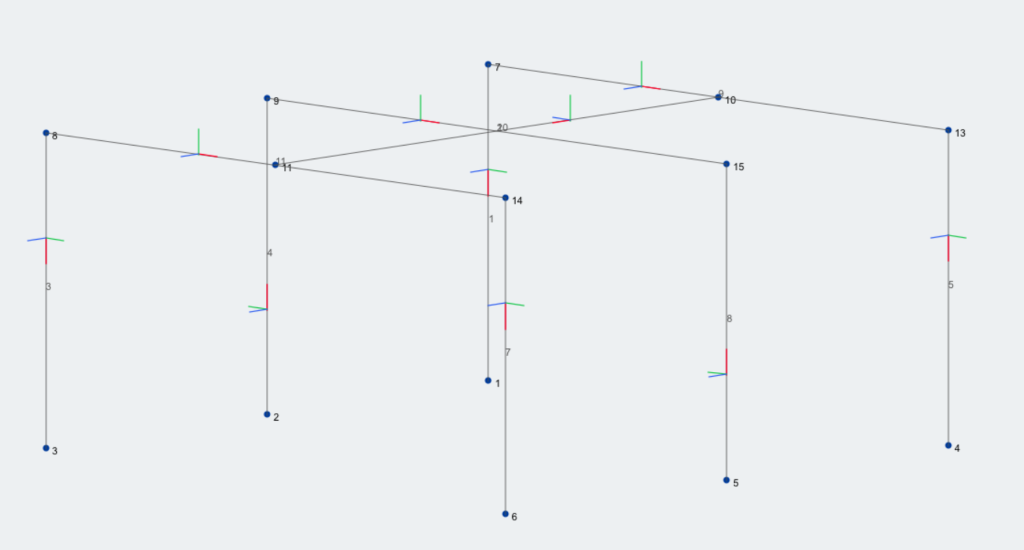
Abaixo é mostrado o mesmo quadro, mas na visualização do quadro com fio:
Como funcionam os deslocamentos?
Os deslocamentos criarão “pressão de velocidade calculada” entre um membro e seu nó, mas ainda conectado ao nó. Está conectado por um invisível Link rígido. Um link rígido é um link rígido imaginário que une o nó ao local de deslocamento do membro, de modo que traduzam perfeitamente as cargas, deflexão e rotações entre si.
Como os membros não estão mais conectados em seus pontos médios, esta ligação rígida criará um pequeno braço de momento e, portanto, afetará as forças internas da barra. Pode criar forças adicionais de torção ou momento fletor na barra. Muitas vezes esses valores são mínimos e muitas vezes podem ser considerados insignificantes.
Leia mais sobre links rígidos e seu comportamento no Membro documentação.
Observação ao usar deslocamentos
É importante ter cuidado ao usar deslocamentos e vínculos rígidos para garantir que os membros ainda estejam conectados corretamente. Por exemplo, se você anexar um link rígido a um suporte FFFRRR (tradução fixa é em todas as direções – livre para girar em todas as direções), você pode esperar que esse membro ainda seja suportado no X,Y,Tradução Z. Contudo, o elo rígido é tecnicamente livre para girar e as forças podem não ser transferidas conforme pretendido:
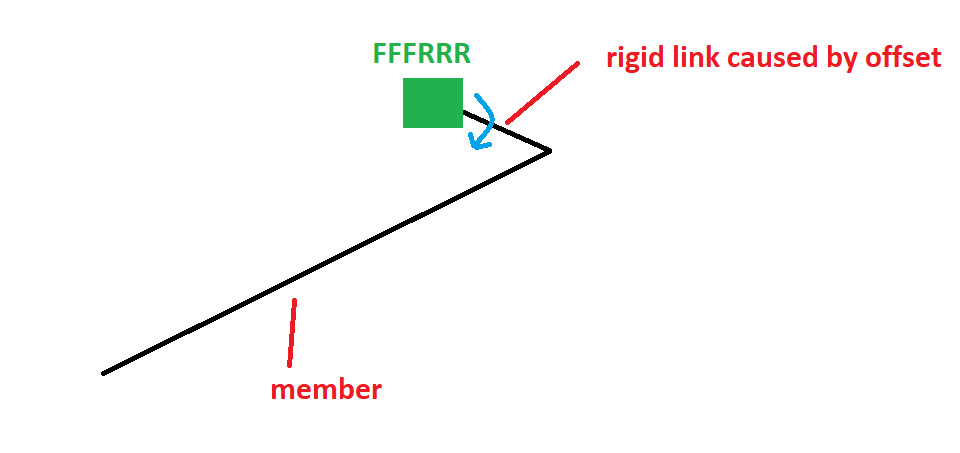
(Observação: Neste caso, uma configuração correta pode ser um suporte totalmente fixo e então FFFRRR na extremidade do membro para impedir que o membro rígido gire)
Pontos de Inserção
Os pontos de inserção são uma forma comum de controlar o posicionamento da conexão a um membro. Por padrão, o membro será conectado a outros elementos através de seu centróide. Com pontos de inserção, você pode mover isso para outros pontos-chave da seção. Os pontos de inserção são construídos com base na mesma funcionalidade dos deslocamentos para equilibrar a precisão do software com uma experiência de usuário limpa e fácil.
Os pontos de inserção são fáceis de controlar usando Member Offsets:
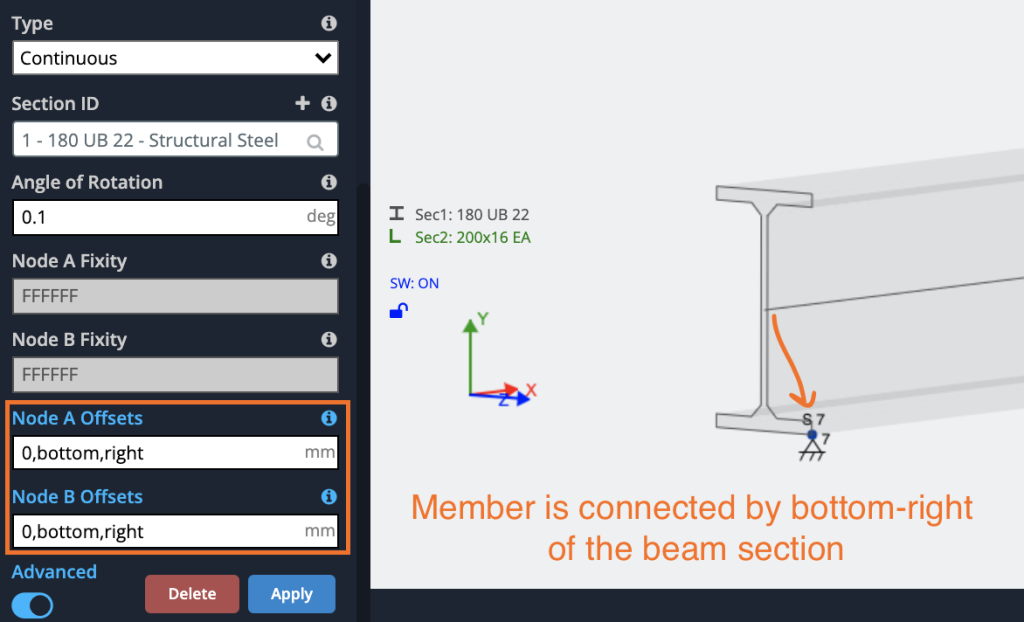
Os pontos de inserção podem ser definidos pelo seguinte:
- Primeira entrada – apenas número
- Segunda entrada – figura superior, figura inferior, cisalhamento ou centro
- Terceira entrada – direito, deixou, cisalhamento ou centro
- Quarta Entrada – (Opcional) Adicionando um quarto argumento como “vemitir”, o solucionador irá ignorar as compensações na análise, e use-os apenas nos gráficos.
Combinando essas opções, os usuários podem mover seus pontos de inserção para onde precisarem no membro:
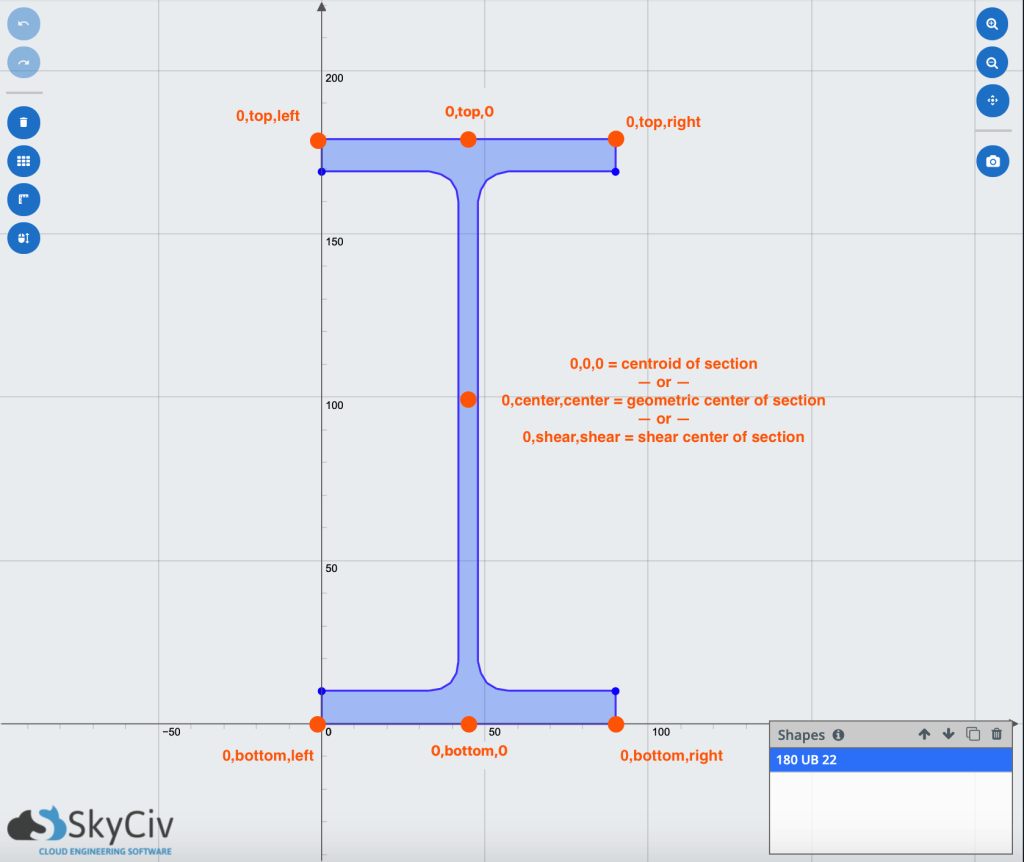
Alguns pontos de inserção comuns de uma viga – Nota: os usuários podem misturar e combinar as diferentes entradas
Alguns exemplos comuns:
| 0,figura superior,0 | Ponto de inserção no topo da viga |
| 0,figura superior,direito | Ponto de inserção no canto superior direito da viga |
| 0,figura inferior,deixou,visual | Ponto de inserção na parte inferior esquerda da viga, ignorar deslocamento na análise (usar apenas para visualização) |
| 0,o cisalhamento,o cisalhamento | Ponto de inserção no centro de cisalhamento da seção |
| 0,0,direito | Ponto de inserção no centroide à direita do feixe |
| 0,t,r | Ponto de inserção no canto superior direito da viga |
Observação: para todas as entradas acima, os usuários podem inserir apenas a primeira letra como um atalho. Por exemplo. “0,t,eu” seria o mesmo que entrar “0, figura superior, deixou”
Os efeitos dos pontos de inserção
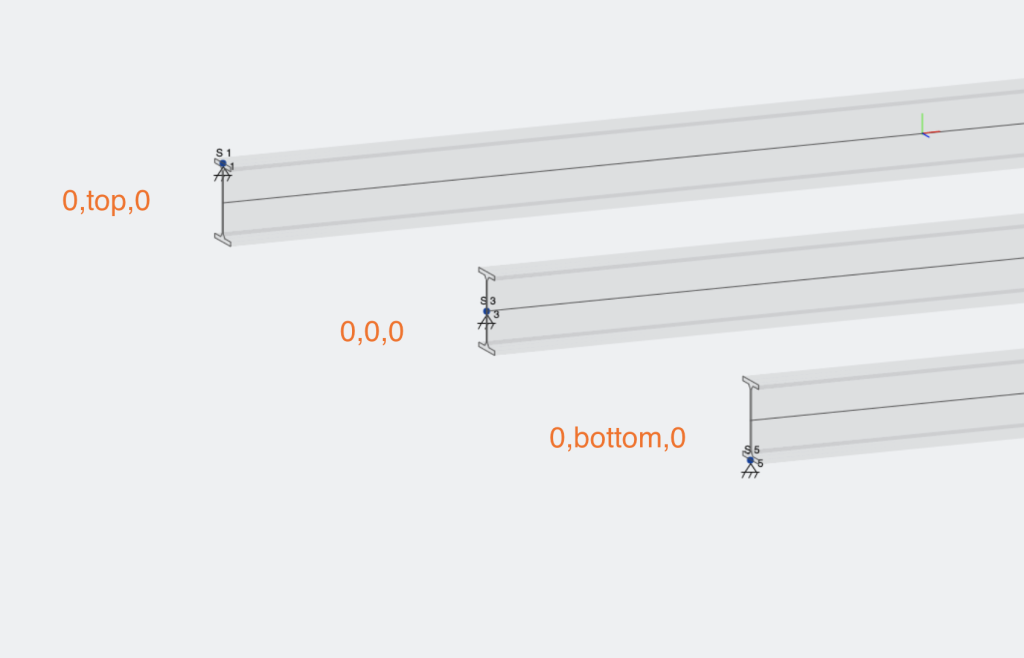
Abaixo estão alguns exemplos dos efeitos de diferentes pontos de inserção. Incluindo um ponto de inserção, um membro rígido será introduzido nas extremidades do membro para compensar a localização do centróide. Então, no exemplo abaixo, temos três pontos de inserção possíveis:
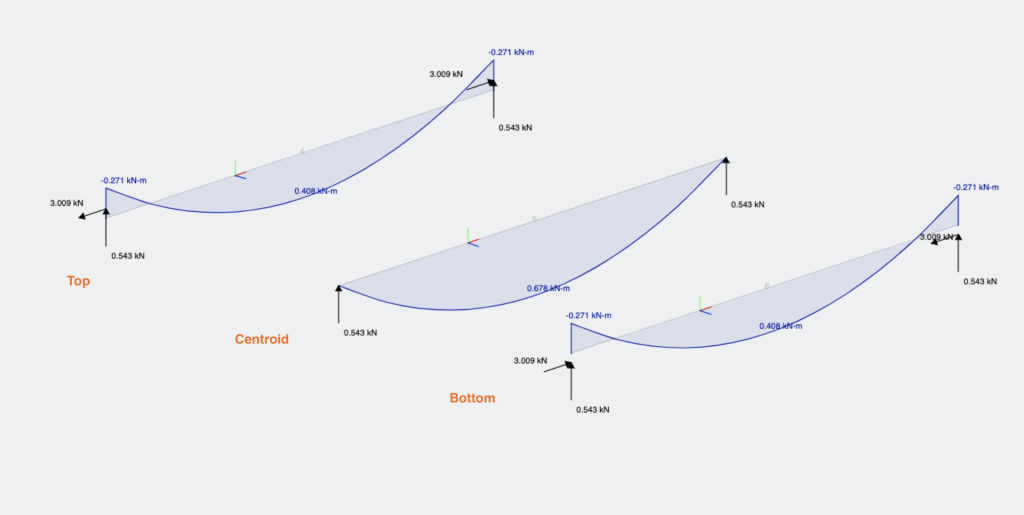
Os diferentes pontos de inserção terão efeitos diferentes tanto na deflexão, diagramas de reações e momentos fletores de membros:
Pontos de inserção (compensações) também pode existir ao longo de um membro inserindo um número como a primeira entrada, aqui estão 3 exemplos de tais: