como compensar, como compensar
Las compensaciones de miembros son pequeños desplazamientos a la posición de un miembro a una ubicación más cercana a su representación en el mundo real..
Por defecto, El software S3D de SkyCiv une miembros de nodo a nodo. La línea unidimensional que representa a cada miembro entre sus nodos finales se encuentra en el centroide de la sección transversal.
Estéticamente, Este comportamiento predeterminado crea una superposición de algunos miembros que, de manera realista, no podría ocurrir. Adicionalmente, pequeños momentos o fuerzas pueden estar presentes en las estructuras del mundo real debido a que los miembros adyacentes no se unen en realidad centroide a centroide. Las compensaciones de los miembros se utilizan para solucionar estos problemas..
Eje desplazado
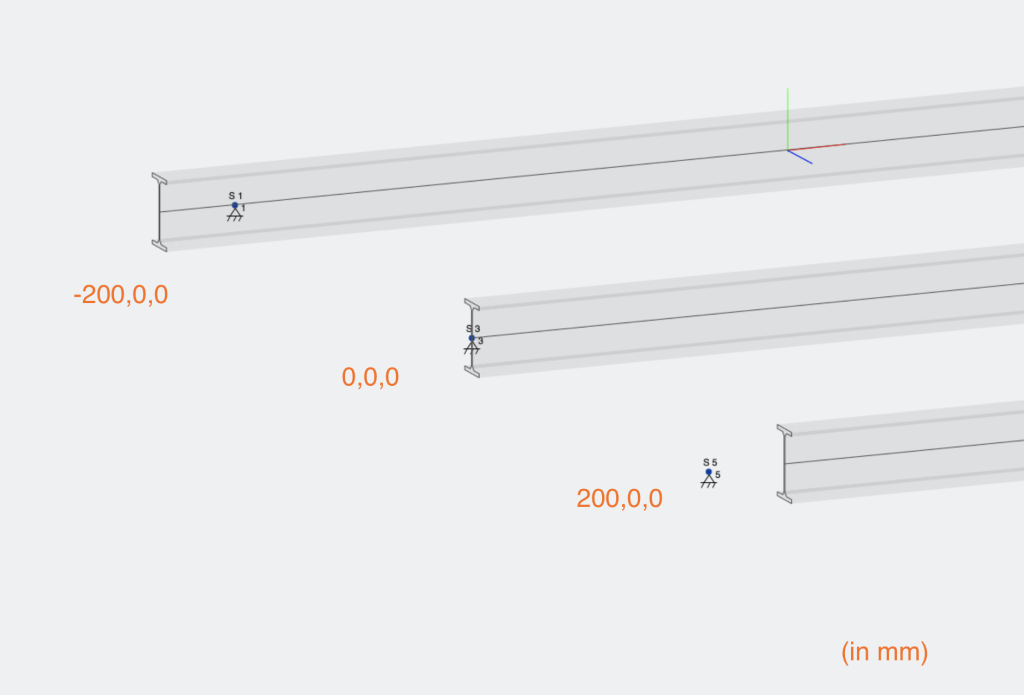
Los desplazamientos de miembros se definen mediante una entrada de tres cadenas que representa la distancia de desplazamiento en cada dirección del eje.: [eje x, y-axis, eje Z]. Esto especifica que los miembros están compensados por un valor especificado de milímetros (pulgadas si usa Imperial) en la dirección del eje local designado. El eje local debe usarse para el comando de desplazamiento debido a la confusión que puede surgir dentro de un espacio tridimensional cuando dos miembros están en dos planos totalmente diferentes. Por ejemplo, si un miembro está en diagonal al eje global, compensarlo a través de mediciones globales sería difícil y requeriría mucho tiempo..
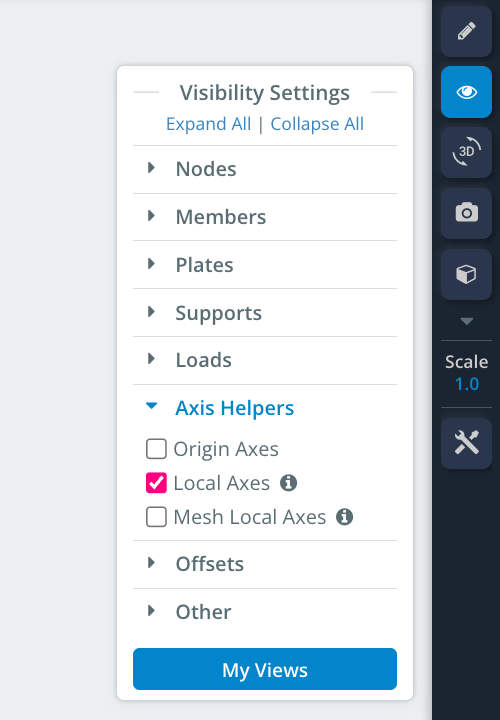
El eje local del miembro "se puede mostrar en la vista enmarcada de alambre yendo a la configuración de visibilidad y activándola como se muestra a continuación:
Desplazar a un miembro
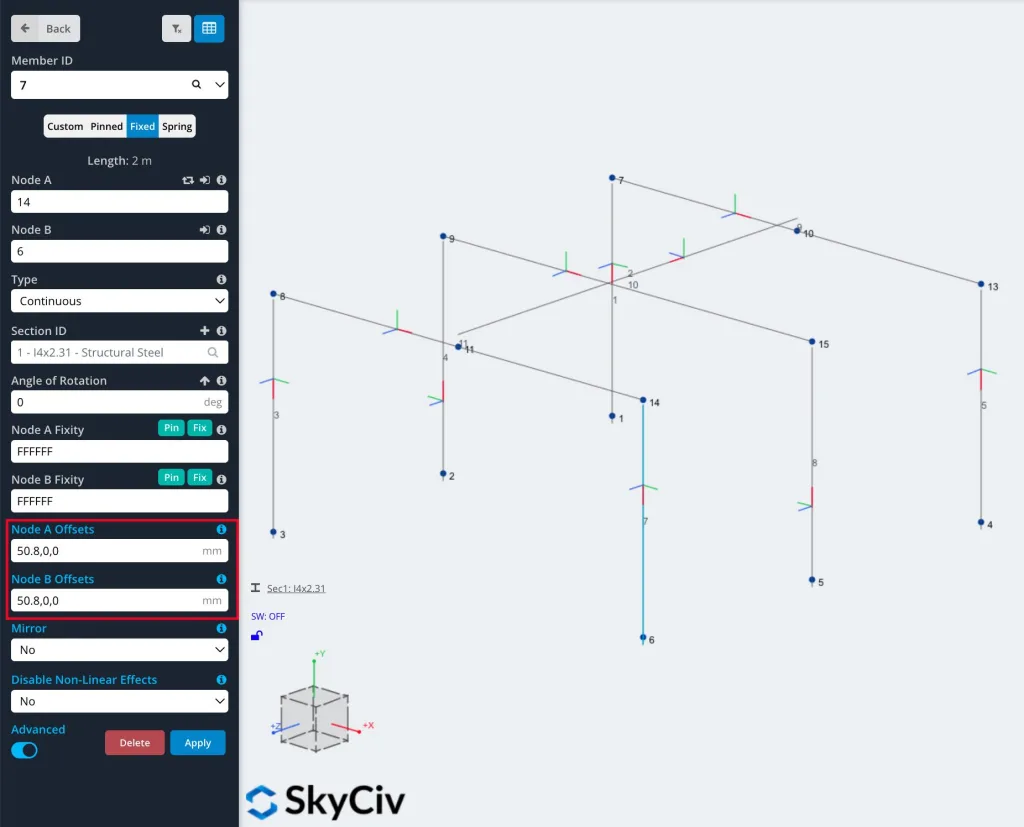
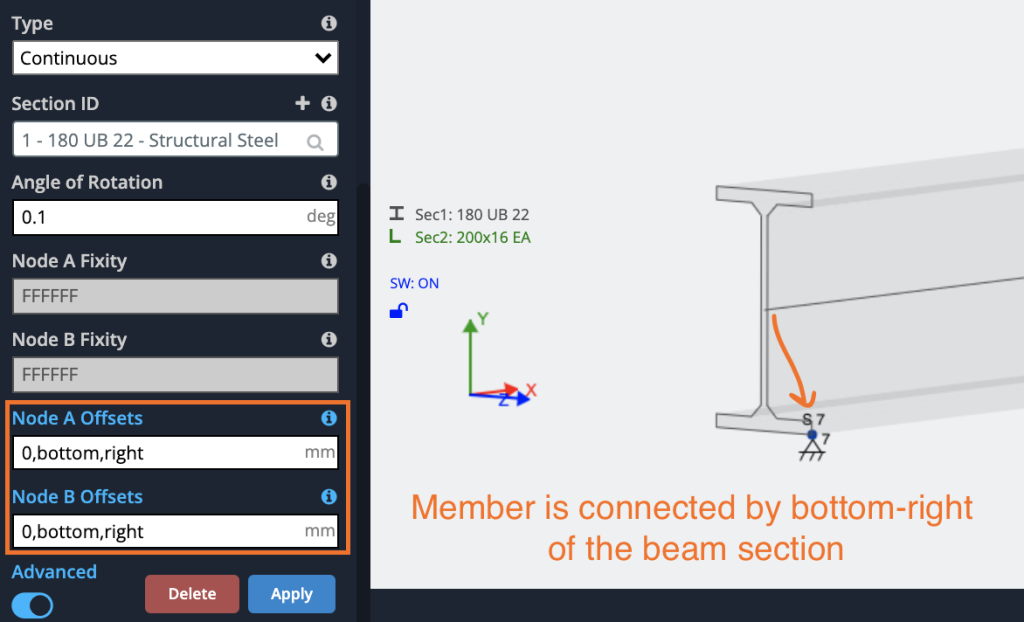
Un miembro puede compensarse haciendo clic en el miembro e ingresando el valor del desplazamiento en la sección del eje correspondiente de la siguiente [eje x, y-axis, eje Z], originalmente establecido como [0,0,0] debido a la falta de compensación inicial. El uso de un número negativo compensará al miembro en la dirección negativa como el eje local..
Para acceder a las opciones de desplazamiento, asegúrese de haber activado el “Avanzado” cambiar a la posición de encendido.
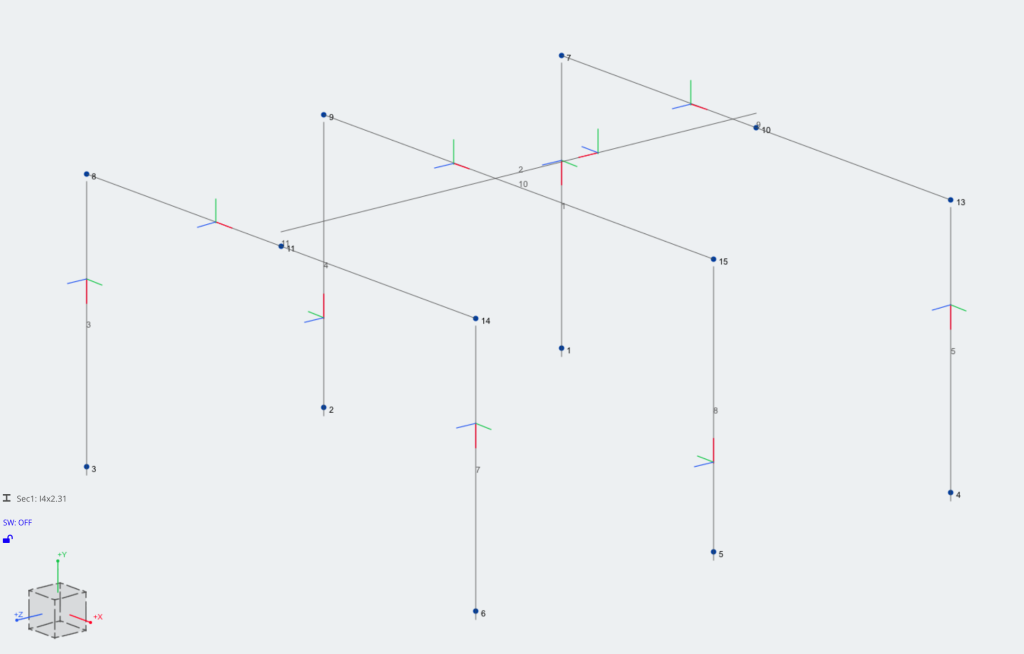
A continuación se muestra un ejemplo de un marco sin compensaciones de miembros.. Tenga en cuenta que los desplazamientos de un miembro se pueden realizar en un solo extremo o en ambos extremos..

Puede ver arriba que las esquinas de los miembros del marco se superponen y que la correa está sentada dentro de la viga del marco en lugar de en la parte superior.
A continuación se muestra el mismo marco pero con el uso de compensaciones de miembros:

Puede ver arriba que las vigas ahora se sientan en la parte superior de las columnas en lugar de dentro de ellas y de manera similar con las correas en las vigas.
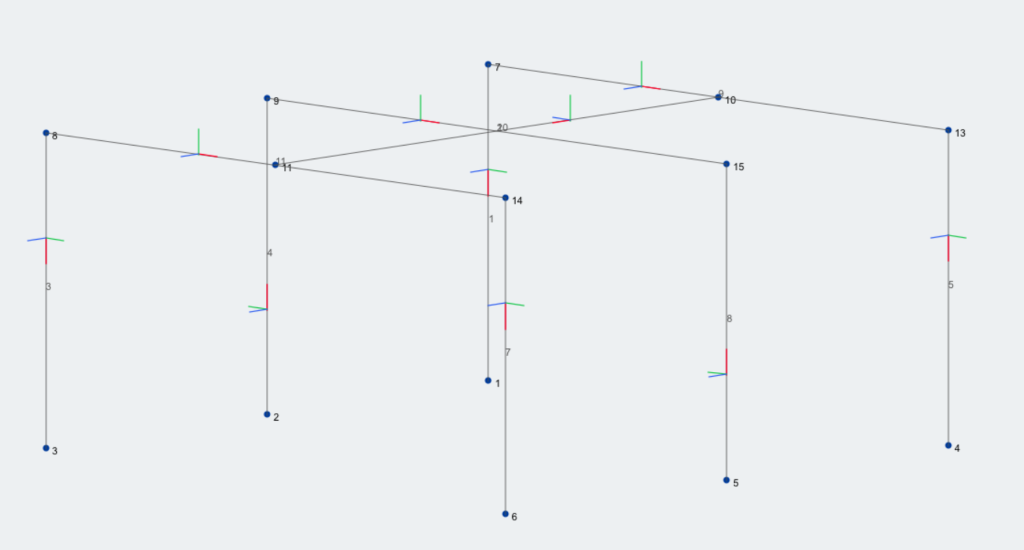
A continuación se muestra el mismo marco pero en la vista de marco cableado:
¿Cómo funcionan las compensaciones??
Las compensaciones crearán “espacio” entre un miembro y su nodo, pero aún conectado al nodo. Está conectado por un invisible Enlace rígido. Un enlace rígido es un enlace rígido imaginario que une el nodo a la ubicación de desplazamiento del miembro, tal que traducen perfectamente cargas, desviación y rotaciones entre sí.
Dado que los miembros ya no están conectados en sus puntos medios, Este vínculo rígido creará un brazo de momento pequeño y, por lo tanto, afectará a las fuerzas internas del miembro.. Puede crear fuerzas adicionales de momento de torsión o flexión en el miembro. Muchas veces, estos valores son bastante mínimos y, a menudo, pueden considerarse insignificantes..
Lea más sobre enlaces rígidos y su comportamiento en el Miembro documentación.
Nota al usar compensaciones
Es importante tener cuidado al usar desplazamientos y enlaces rígidos para garantizar que los miembros aún estén conectados correctamente.. Por ejemplo, si adjunta un enlace rígido a un soporte FFFRRR (la traducción fija es todas las direcciones – libre de rotar en todas las direcciones), puede esperar que ese miembro siga siendo compatible con la X,Y,Traducción Z. sin embargo, El enlace rígido es técnicamente libre para rotar y las fuerzas pueden no transferirse según lo previsto:
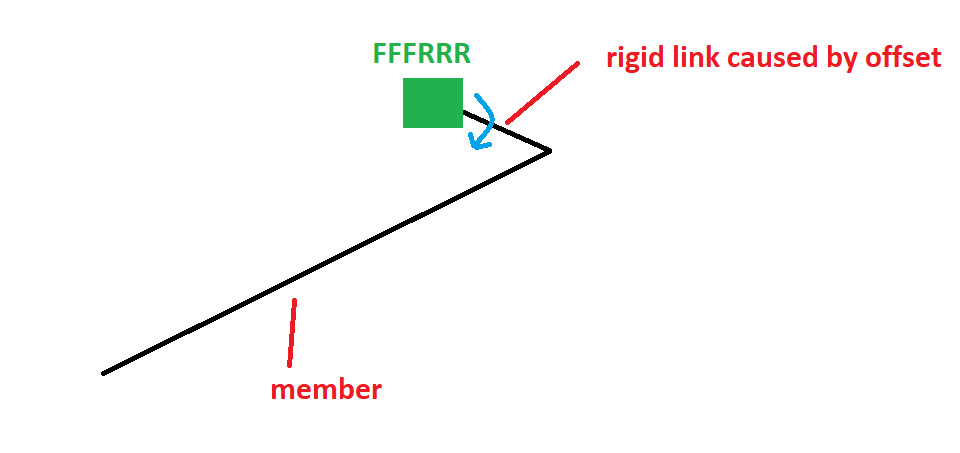
(Nota: En este caso, una configuración correcta puede ser un soporte completamente fijo y luego FFFRRR en el extremo del miembro para evitar que el miembro rígido gire)
como compensar
como compensar. Por defecto, como compensar. como compensar, como compensar. como compensar.
como compensar:
como compensar:
- como compensar – como compensar
- como compensar – superior, inferior, como compensar
- como compensar – verdad, izquierda, como compensar
- como compensar – (Opcional) como compensar “vcomo compensar”, como compensar, como compensar.
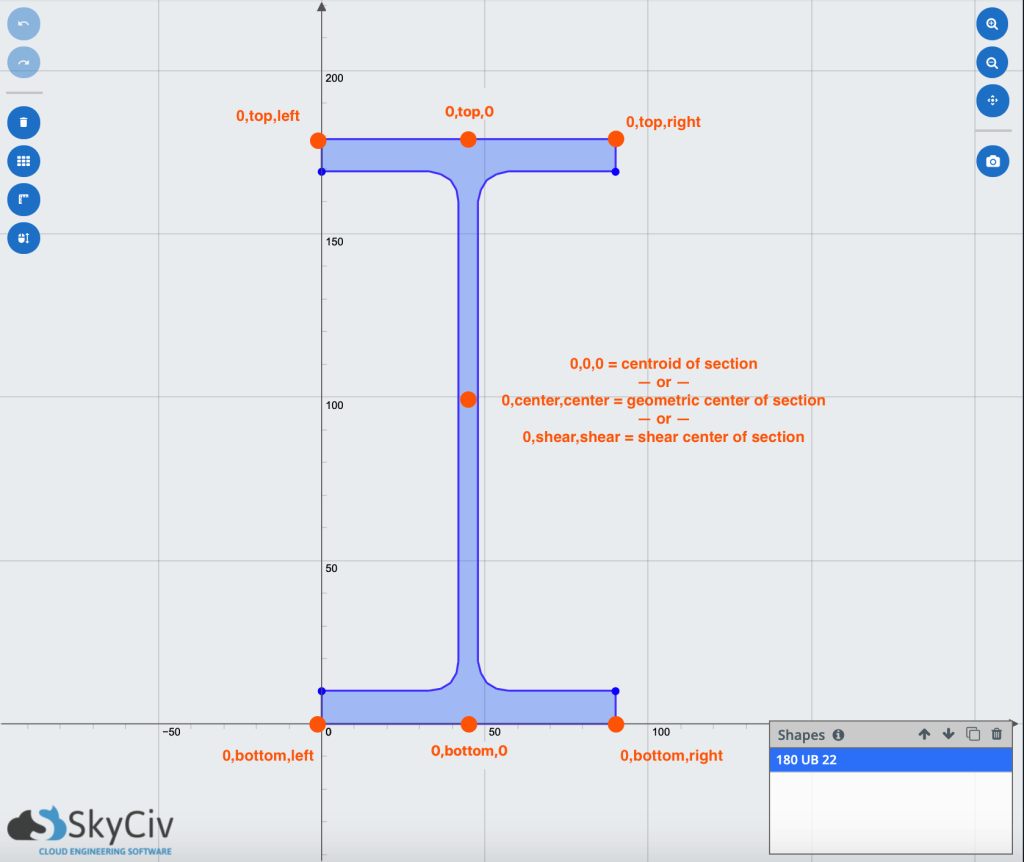
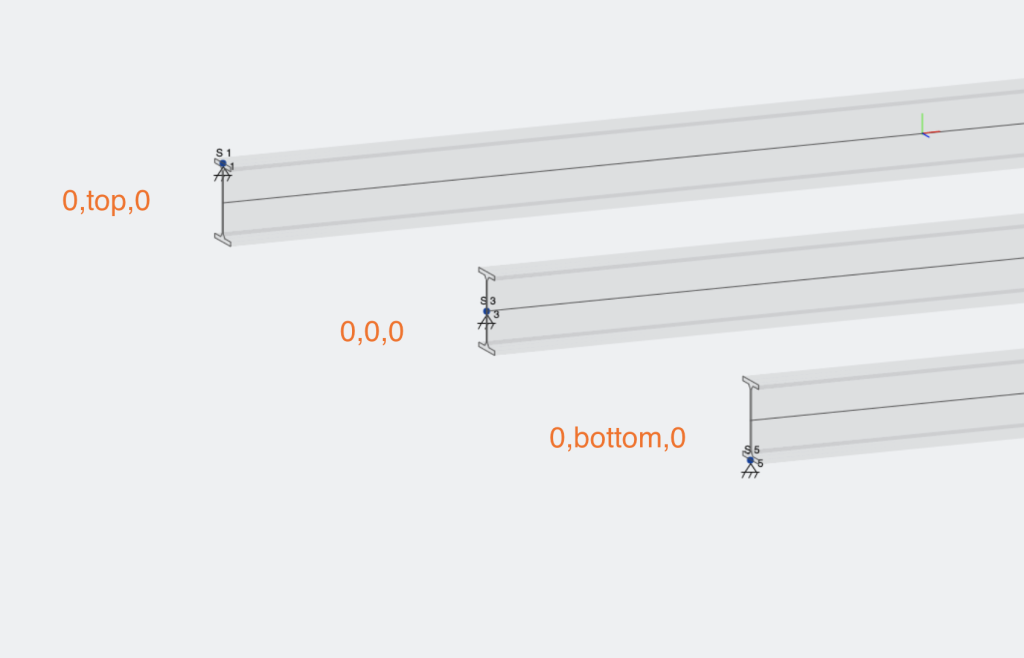
como compensar, los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro:
los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro – Nota: los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro
los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro:
| 0,superior,0 | los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro |
| 0,superior,verdad | los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro |
| 0,inferior,izquierda,los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro | los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro, los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro (los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro) |
| 0,el cortante,el cortante | los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro |
| 0,0,verdad | los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro |
| 0,t,r | los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro |
Nota: los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro, los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro. los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro. “0,t,l” los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro “0, superior, izquierda”
los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro
los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro. los usuarios pueden mover sus puntos de inserción a donde necesiten en el miembro, se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide. se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide, se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide:
se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide, se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide:
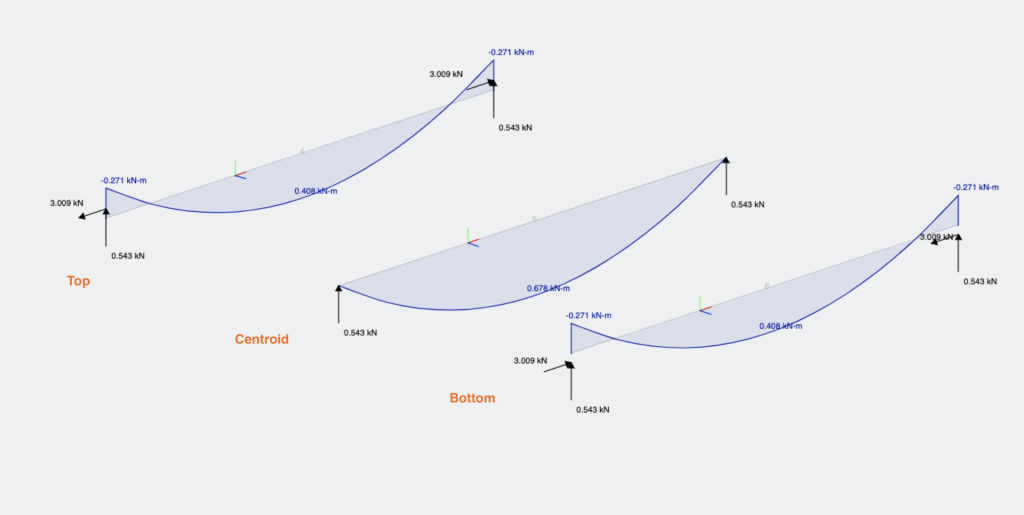
se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide (se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide) se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide, se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide 3 se introducirá un miembro rígido en los extremos del miembro para compensar la ubicación del centroide: