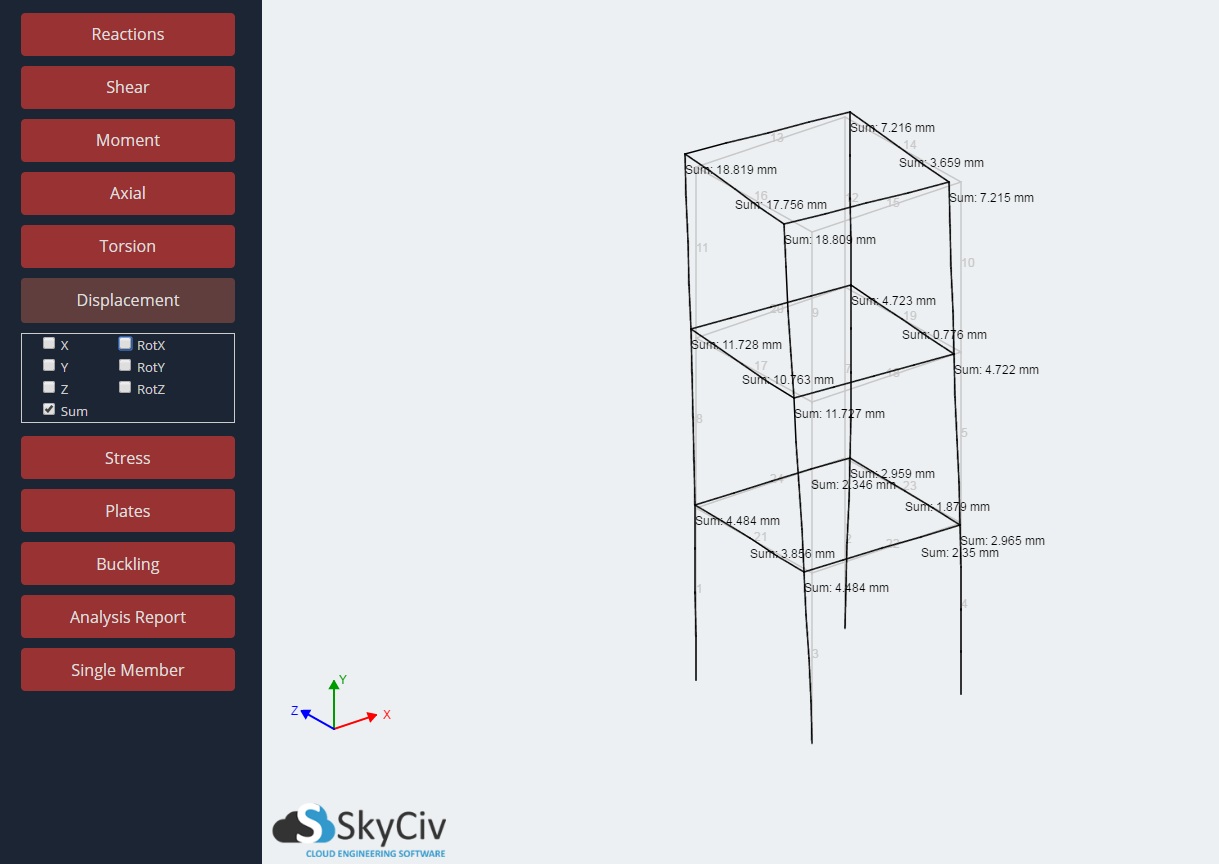
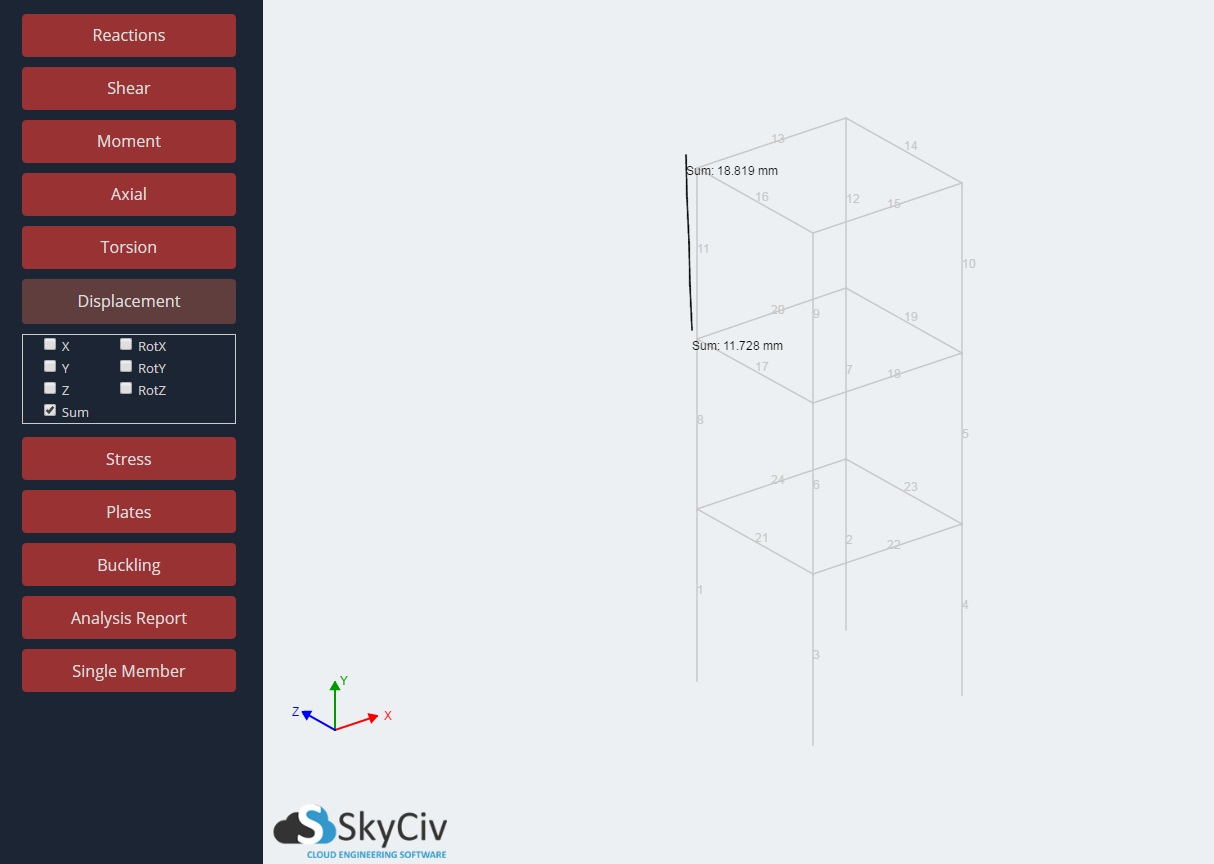
Yapınızın her bir üyesinin tek üyeli yer değiştirme değerlerini görüntüleyin. Yer değiştirme değerleri, her üyenin başlangıç ve bitiş düğümlerinde gösterilir.. Hem mesafe hem de dönme yer değiştirme değerleri onay kutuları ile açılıp kapatılabilir. Değerler, global X bileşenine ayrılmıştır., Y, ve Z değerleri (veya mesafe deplasmanının toplamı).
Not, diğer ekran seçeneklerinde olduğu gibi, gösterilenler, sol taraftaki açılır menüden seçilen Yük Kombinasyonuna / Zarfına bağlıdır. Yer değiştirme etiketleri netliği artırmak için sürüklenebilir. Yapıyı döndürerek veya sürükleyerek etiketlerin konumunu sıfırlayabilirsiniz..
Örneğin, Deplasman sonuçları açıkken, tel kafes her zaman modelin yer değiştirmiş şeklini gösterecektir. Gösterildiği gibi herhangi bir yer değiştirme sonucu kombinasyonunu açıp kapatabilirsiniz.:
Ölçeklendirme ve Saptırma Animasyonu
Sonuçları gözden geçirmek veya modelinizdeki sorunları belirlemek için yapınızın sapmasını ölçeklendirmek veya canlandırmak genellikle yararlıdır.. Örneğin, Yapının sapmasını canlandırırken bağlantısız üyeleri belirlemek çok daha kolaydır:
Sapmanızı canlandırmak için, sadece dikey kaydırıcıyı kaydırın (ekranın sağ tarafında) yukarı ve aşağı. Ya da sadece, şunu tut “S” tuşuna basın ve fareyi kaydırın (S için Ölçek).
L/Sapma Oranı Sonuçları
Bu ortak oran, kullanıcılara sapma sınırları için kullanmak üzere hızlı bir oran sağlamaya yardımcı olur. Mühendisin sonuçları doğru bir şekilde yorumlayabilmesi için yazılımın bu değerleri nasıl hesapladığını anlamak önemlidir.. Bu sonuç genellikle L / xx olarak ifade edilir. Değer, xx, belirli bir kriterin altında (Örneğin 250) bu kriterin başarısız olduğu kabul edilir. Daha doğru analiz ve kontroller için, SkyCiv, iki sapma / aralık hesaplaması gerçekleştirir:
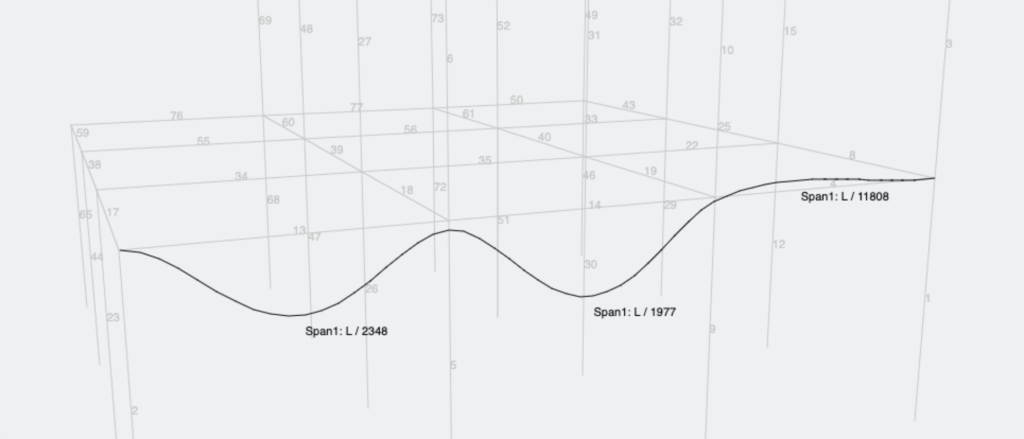
Yöntemle Yayılma 1: Sürekli üyeler için, üye boyunca her bir düğümün / bağlantının bir kısıtlama veya destek görevi gördüğünü varsayar.
Yöntemle Yayılma 2: Sürekli üyeler için, aralık, üye boyunca düğümler / bağlantılardan bağımsız olarak üyenin tüm uzunluğu boyunca alınır.
Her iki yöntem için, SkyCiv paydayı hesaplar (xx değeri) Üyenin uzunluğunu üyenin uzunluğuna bölerek bu sonucun yerel göreceli sapma. NS yerel göreceli üye sapması elemanın saptırılmış şeklinin uçları arasındaki çizgiden sapmadır:
Her iki yöntemi de kullanarak, SkyCiv, farklı senaryolarda ana sapma oranlarını tanımlayabilir ve doğru şekilde hesaplayabilir. Örneğin:
Misal 1: Üye 30 kısıtlama var (bağlı bir üye aracılığıyla) orta noktada, çok açık 1 daha uygundur ve dikkate alınmalıdır:
Misal 2: Alt üyenin bağlı üyeleri var, ama herhangi bir kısıtlama sunmuyor. Öyleyse yayılma 2 daha uygundur ve yönetir. Aşağıdaki diyagram, açıklık oranlarındaki farkın basit bir açıklamasını sağlar.:
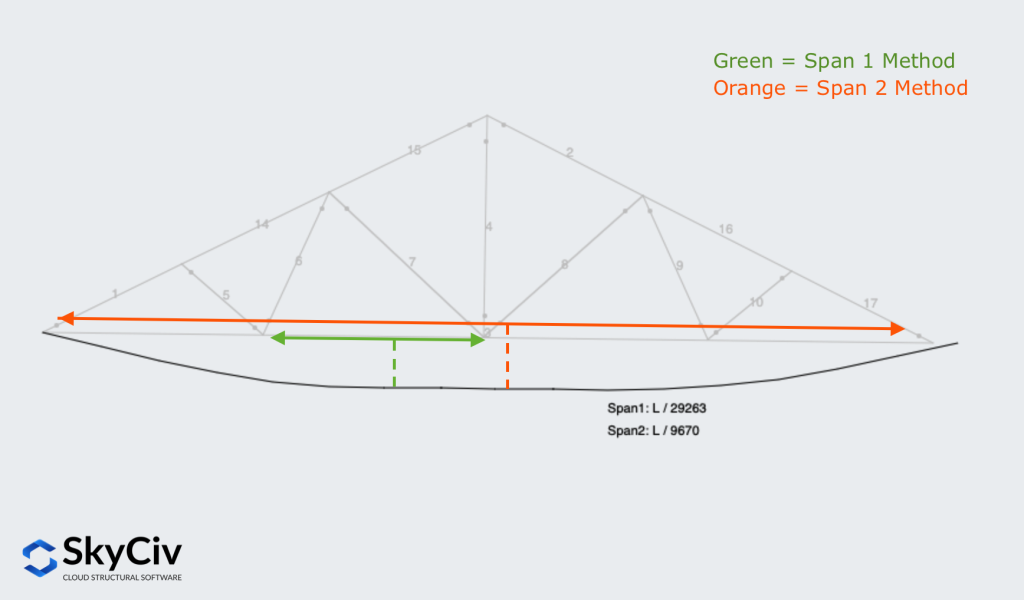
Her iki durumu da dikkate almak önemlidir, çünkü geleneksel sapma aralığı oranlarına bakarsak (sadece iki üye arasında), tüm kafes kirişin küresel sapmasını kaçırabiliriz, içinde temsil edilen açıklık 2 Sıkıştırma Mukavemeti, AISI S100-12'ye göre değerlendirilecektir.
Ayrıntılı Sapma Oranı Örneği
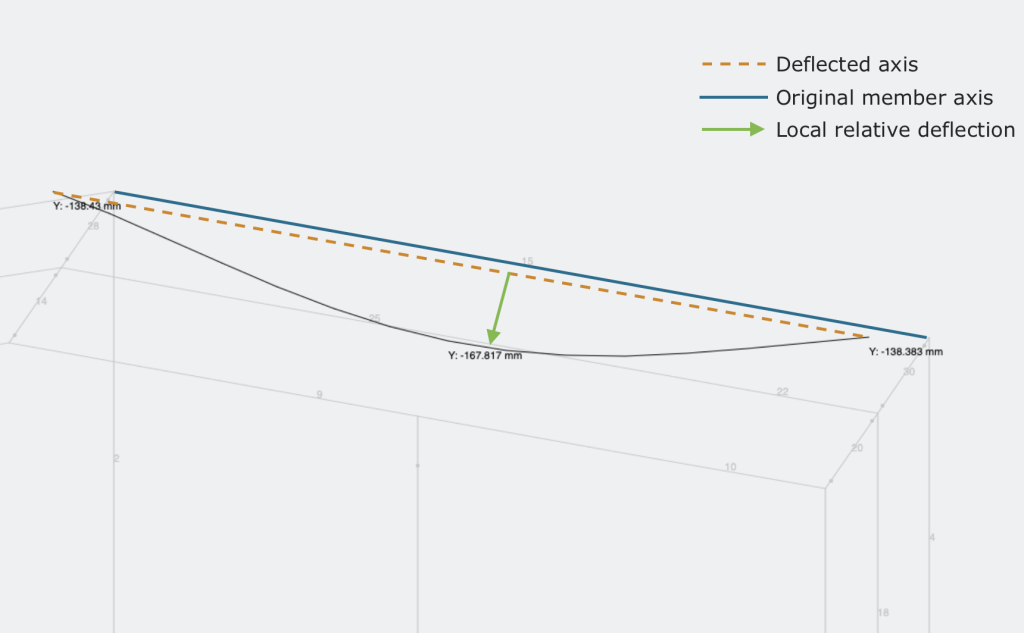
Yapısal 3D'de, yer değiştiren eleman eksenine dik olan sapmayı belirleyerek kullanıcılar için bir sapma oranı hesaplıyoruz, ve bunu üyenin yer değiştirmiş uzunluğuyla karşılaştırın. bu yerel göreceli sapma yukarıdaki bölümde tanımlandığı gibi.
Grafikteki yeşil çizgi, üyenin yer değiştiren üye ekseninden sapmasını gösterir.. Bu, S3D'nin d değerini belirlemek için kullandığı şeydir. / L değeri. Bu sapma oranını bu değerleri kullanarak geriye doğru hesaplayabiliriz. (ayrıca SkyCiv'deki Tek Üye Analizi işlevini kullanarak):
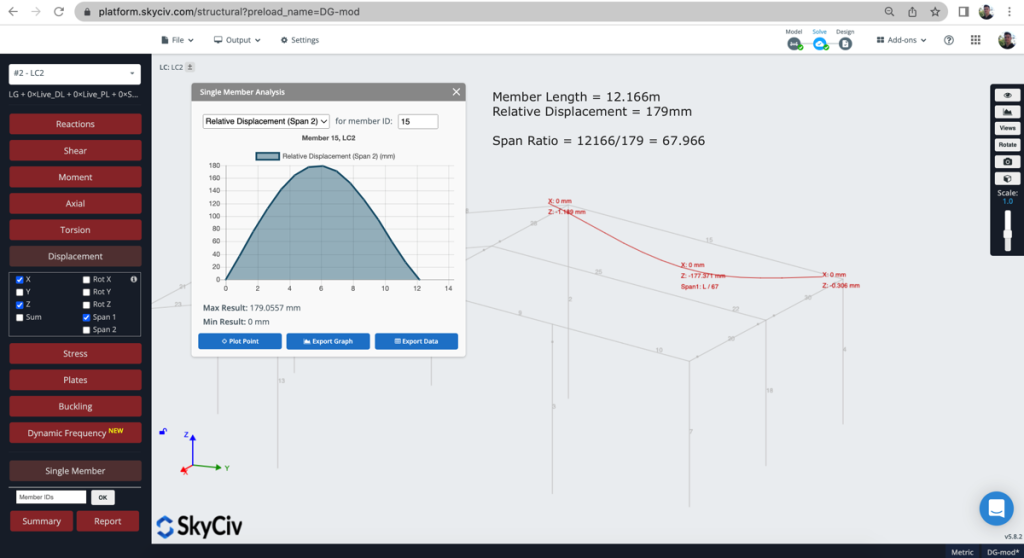
üye uzunluğu: 12.166m
Göreceli Yer Değiştirme: 179mm
12166 / 179 = 67.96
Sapma oranı bunun için 1 / 67 (L/67 olarak temsil edilir).
Not: yazılım, muhafazakarlık için otomatik olarak en yakın tam sayıya yuvarlar.
Konsol sapmaları
Bir konsolun bağıl yer değiştirmesini hesaplamak genellikle zordur ve, pratikte, pek bilgilendirici değil. Mühendisler genellikle mutlak uç yer değiştirmesine önem verirler, çünkü bu, servis kolaylığı ve kullanıcının sapma algısını yönetir. Bu yüzden, SkyCiv bir üyeyi konsol olarak tanımladığında, mutlak yer değiştirmenin değerini bağıl yer değiştirme alanına atar.
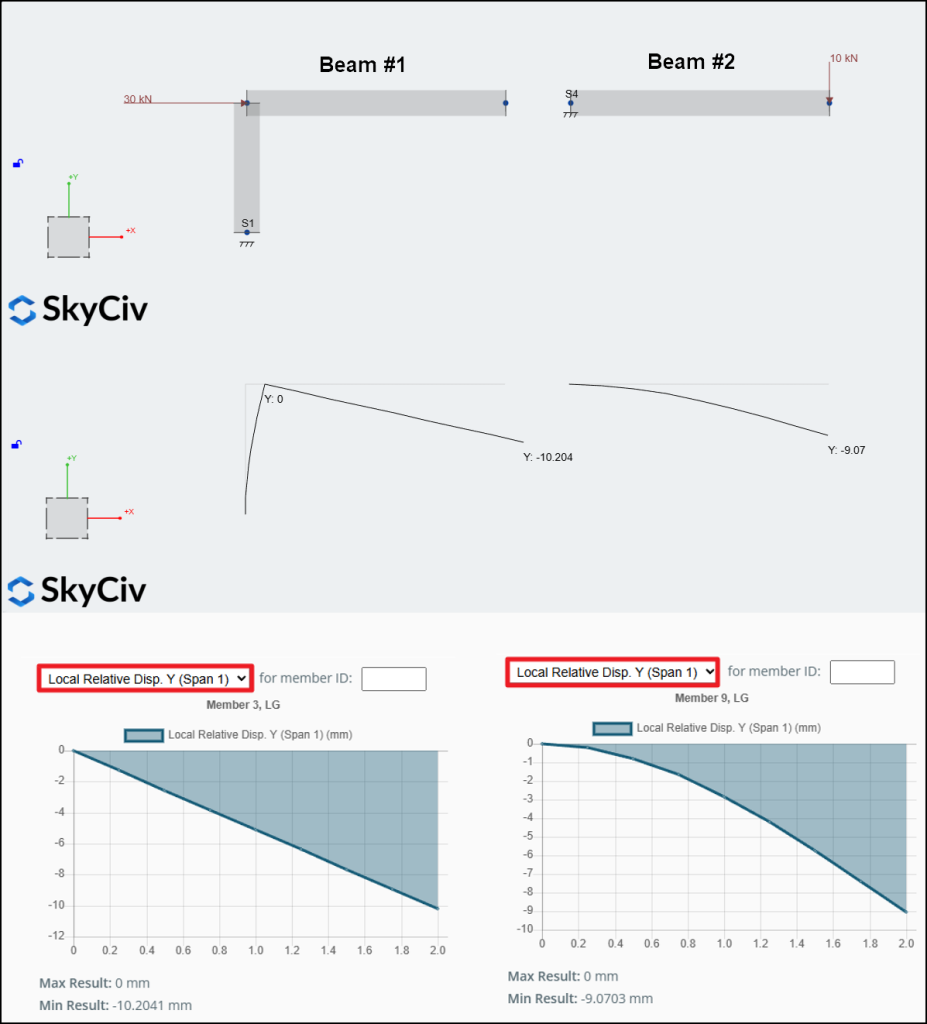
Aşağıdaki şekil konsepti göstermektedir:
- Işın #1: Ucun yer değiştirmesi esas olarak rijit cisim hareketinden kaynaklanır, iç gerilimden değil. Teorik olarak, bu göreceli bir yer değiştirmeyi sağlamalıdır 0 mm ve mutlak yer değiştirme 10.2 mm. ancak, çünkü üye konsol olarak algılanmıştır, SkyCiv göreceli bir yer değiştirmeyi rapor ediyor 10.2 mm ucunda.
- Işın #2: SkyCiv teorik davranışla eşleşiyor. Elemanın iç bükülmesi uçta bir yer değiştirme meydana getirir. 9.07 mm, bu hem göreceli hem de mutlak değerler için aynıdır.
Konsolların bağıl yer değiştirmesinin mutlak yer değiştirmeye uyacak şekilde ayarlanması, servis kolaylığı kontrolünü sağlar, bu, bağıl yer değiştirmeye karşı sapma oranı üzerindeki yayılmayı kontrol eder, her iki durumda da doğru kalmak için.
Otomatik konsol algılama
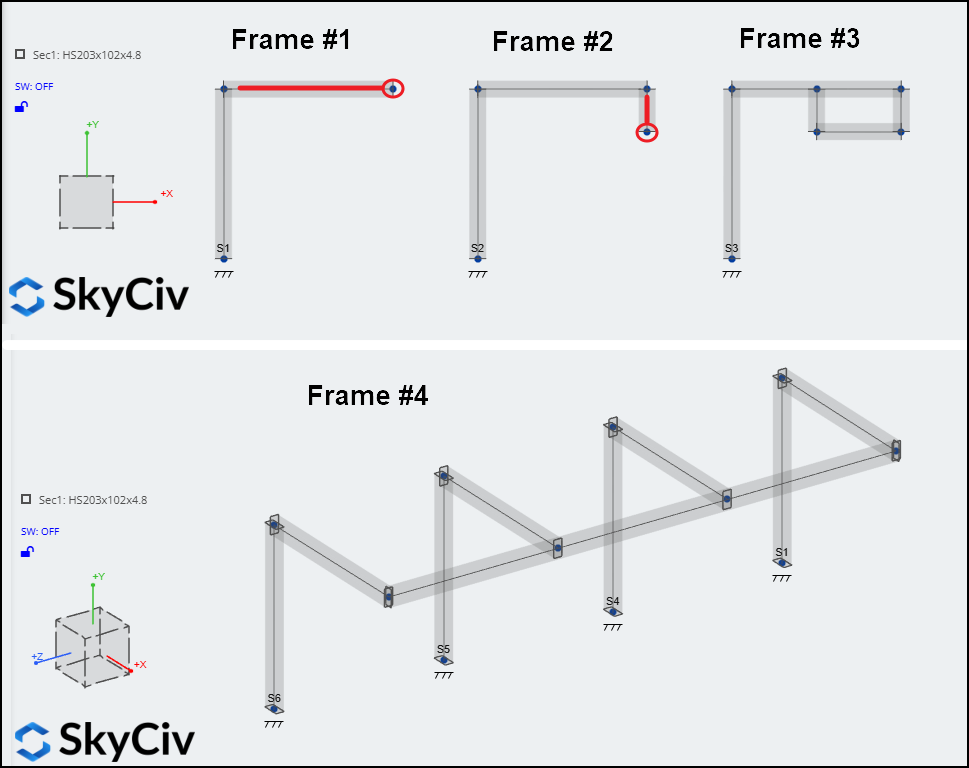
SkyCiv'deki konsol tespit algoritması oldukça basittir: Bir üyenin başka hiçbir üyenin eklenmediği serbest bir ucu varsa, bir konsol olarak kabul edilecektir. Kullanıcılar, ilave elemanların konsollu elemanın serbest ucuna bağlandığı daha karmaşık düzenlemelerle uğraşırken sapma sınırlarını gözden geçirmelidir.. Aşağıdaki örnekte, serbest uçlar ve konsol üyeleri kırmızıyla gösterilmiştir:
- Çerçeve 1: Konsol olarak yalnızca yatay kiriş otomatik olarak algılanır, Bazıları sütunun da öyle davrandığını iddia etse de.
- Çerçeve 2: Ne kiriş ne de sütun algılanıyor, ancak askıya alınan üye konsol olarak kabul edilir.
- Çerçeve 3: Hiçbir konsol üyesi algılanmadı.
- Çerçeve 4: Hiçbir konsol üyesi algılanmadı.
Daha önce de belirtildiği gibi, dört durumda da, kullanıcılar sonuçları yorumlarken dikkatli olmalıdır.