ジョン・モレイのために, ヒルクライムレースカーへの生涯にわたる関心は、 SkyCiv. オートバイや車についてのすべてを読んで育った, それらを修正および変更する, 彼は物事をまとめることに関して決定を下す人になりたいと結論付けました. の時代から 20-22, 彼はレーシングカーを所有していましたが、最終的には衝突事故で台無しになりました. 50 数年後, 彼はスポーツへの情熱を再燃させ、新しい車を作ることに情熱を注いでいます.
タイプ: 機械的
エンジニア: ジョン・モレイ
“あなたのプログラムがどれほど簡単で便利だったかをあなたに伝えることはできません, そしてそれはプロジェクトに大きな違いをもたらしました。”
プロジェクトについて
このプロジェクトの場合, ジョンは、シンプルでありながら軽量でパワフルなヒルクライムレースカーを作りたかったのです。, スケールアップしたゴーカートと1300ccエンジンから. 現時点でこれはリリースされました, ジョンは実際に彼の夢を構築することに取り組んでいました, 完成時にそれを見るのはとても楽しみです!

図 1: ジョンが設計したものと同様のヒルクライムレースカー
挑戦
このプロジェクトの主な優先事項は、ドライバーの安全でした, 3Dスペースフレームデザインの開発につながる. フレームを小さなモデルから実物大にスケールアップするために多大な労力が費やされました. 主に, ここでの課題は、レース中に見られるであろう力の剛性と軽さを維持しようとすることです.
この場合, シングルシートのオープンホイールヒルクライムカーが参加します “フォーミュラリブレ” クラス, つまり、この競技の車は多くのルールの影響を受けません, エンジニアリングの決定をより簡単で寛容にする.
ここでは、さまざまなタイプのサスペンションを検討する必要がありました, しかし “ウィッシュボーン” デザインはジョンと彼のチームによって選ばれました. 車のダウンフォースを最大化するには, ジョンは車の全幅を 2.5 メートル, 必要なトレーラーと同じ幅. これらのより大きな平面寸法は、車の下のより大きな表面積を車に与えます, 高速でのダウンフォースの支援, これは急な曲がり角で非常に重要です.
この課題のもう1つの技術的側面は、車の加速です。. ジョンによると, 加速はフルスピードでパワー制限されてはいけません. これを達成するために4WDと約が必要です 400 過給でかなり可能なHP 1300 ccエンジン. 必要なのは “フェザースロットル” オフライン, しかし全速力で & ダウンフォース, 巨大な電力伝達が可能です.
ジョンからの要約感情:
“プロジェクトは、何年にもわたる反復を通じて、論理的に単純なものから複雑なものに移行しました。, 剛性を保ちながら, 軽量, とドライバーの安全。”
それがどのように設計されたか
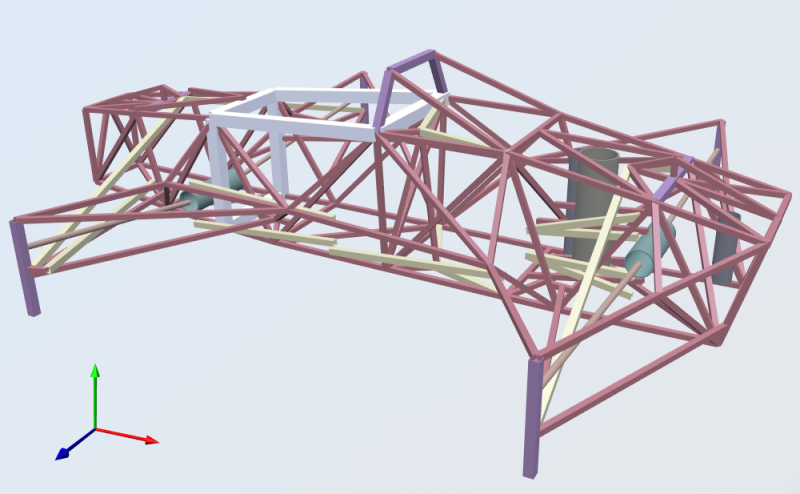
図 2: 3完成したSkyCiv構造3D製品のDレンダリング
上り坂の登りレースカーはしばらく前から出回っています, ですから、かなりの数の既存のものがあります, 最小重量を含む業界の一般的な知識, 壁の厚さ, 構築可能性, 安全に関する推奨事項, 等. このプロジェクトの場合, の “ウィッシュボーン” サスペンションの設計は、接続チューブの追加の曲げ強度が必要になることを意味しました.
手で, ピンジョイントを想定した場合のスペースフレーム設計は 非常に このようなプロジェクトには時間がかかります. このルートを進むエンジニアは間違いを犯しがちです, そして実際には溶接継手だから (固定接続) 存在, 手作業で完成させることは基本的に不可能です. ここでSkyCivがジョンのために登場しました.
プロジェクトのSkyCivでフレームのジオメトリを生成することは、ジョンの学習プロセスになりました. 彼は、ジョンが描いた手描きの図面から得られた測定値を使用して、車の小さな側面から始めました。, ドライバーのフープから始めます. 彼はこれらの手作業による計算が困難になるだろうと気づきました, それで彼は彼が使用する方法を学んだので彼が持っていた小さな構造に徐々にますます追加しました SkyCivプラットフォーム.
スプリングサスペンションも, ジョンはこれらをラーメンチューブとしてモデル化することにしました, 彼は力とストレスに関心を持っていたので, ばねのたわみではありません.
“驚くべきことに、私は数時間後にそれを行うことができました, そして答えは私が手で計算したストレスの観点から理にかなっています, だから私は自分の単一の長方形モデルに追加し始め、車全体になってしまいました, チェーンドライブクリアランスとサスペンションプッシュロッドクリアランスを含みます。”
SkyCivを使用しているジョンにとって、gの加速と力からの移行は非常に簡単でした。. フレームの重量を考慮して、加速度をgで表した内部および正面の基本的な自由体図を使用して、荷重を計算しました。, SkyCivから自動的に彼に与えられた.
ジョンのために, また、ドライバーの上半身と脚がこれらの長方形を横切る対角線を排除していることも明らかでした, ですから、それらは大まかに手作業で梁として設計されています. 彼は私のスペースフレームの矯正中に発見しました 50 何年も前に 90% ねじれの柔軟性の 2 長方形, そうでなければよく三角測量されたスペースフレームで.
ウィッシュボーン荷重ケース & 応力計算は、最初は自由体図を使用して手作業で行われました。, 正確な状況よりも単純になりました, 手計算ができるように, その後、追加の安全率を追加します.
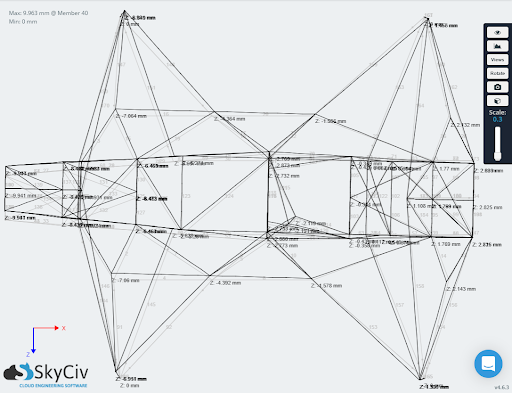
図 3: 荷重ケースの例の平面図のたわみ結果
SkyCivの効果
このようなほとんどの機械プロジェクトの場合, 複雑な分析には、非常に堅牢で複雑なソフトウェアが必要です, 機械加工部品. ジョンにとっては, 彼は、の迅速で簡単なモデリングおよび分析機能を利用することができました。 構造3D – レースカーのフレーム設計には一般的に使用されないモジュール. 通常、構造建築およびフレーム設計に使用されます, 彼は彼の素晴らしいプロジェクトのためにSkyCivプラットフォームの多様性を柔軟にすることができました.
プロジェクトの開始時, ジョンが完了したいくつかの手の計算を確認することが不可欠でしたが、より重要なのは, 彼のフレームのたわみを見つける. の荷重ケース 3 gコーナリング, 3 gブレーキ, 3 g加速度, 3 ジョンによれば、gバンプは簡単に適用できました。.
“…線形応力/たわみの結果は、レンダリングされたモデルで簡単に理解できました, これも本当に良いシャドウイングを持っています。”
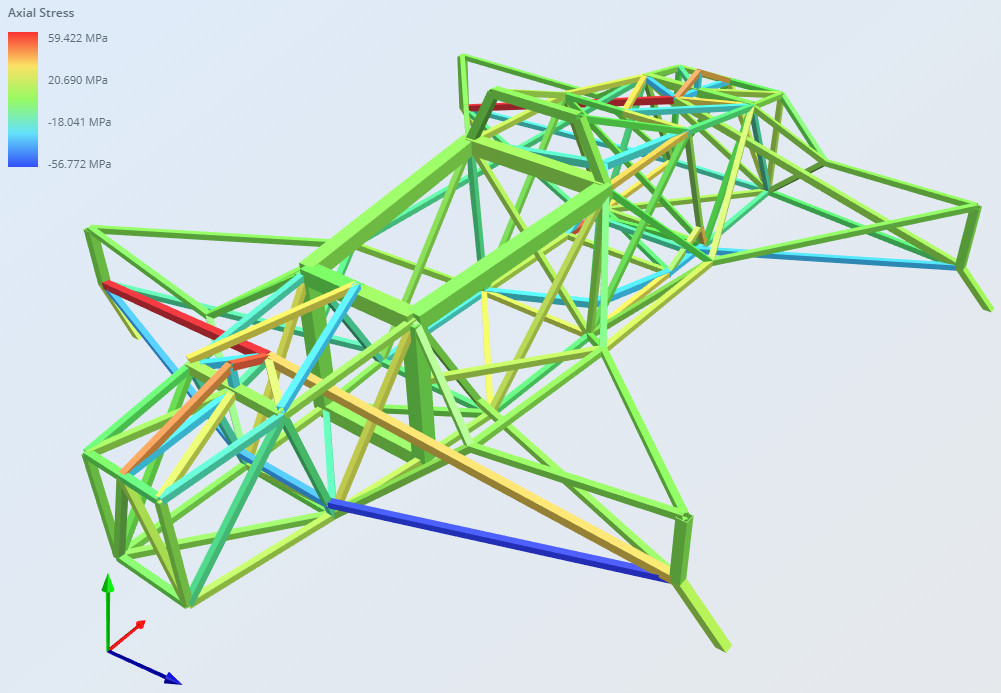
図 4: 3Dレンダリングされた構造3D軸方向応力は、フレームのダウンフォースとコーナリング荷重に起因します
ソフトウェアエイドなし, 彼はそれが多すぎるとあきらめることを完全に期待していました. 車の操作で手元の力を知る, Johnは、Structural 3Dの解析ソルバーを使用して、フレームメンバーの応力とその結果生じるたわみを取得することができました。.
ジョンが3Dレンダリングの価値と分析結果の描写について話す:
“図面からは明らかではないいくつかの干渉を見つけ、いくつかの難しい斜めの部材の位置を改善することができました. これは、他の多くの小さいが重要なシャーシ形状の変更への道を示し、変更の多くの手描きページを保存しました。”
3gコーナリングの適用からのステミング, 制動, 加速度, そして “バンプ” 荷重ケース, ジョンはたわみの結果を使用して、手の計算をクロスチェックし、検証しました, スペースフレームに断面の変更を加えることができます. これは、車のフレームの重量と剛性の両方を最適化するために必要でした. 例えば, 衝突安全性を高めるために、ドライバーの脚とヒップエリアの周りのフレームのサイズを大きくする必要があります。.