ヒンジジョイントとは?
まず, ヒンジジョイントとは? ヒンジ接続により、2つのメンバーが接続を中心に回転することができます. ヒンジで, 両方のメンバーが拘束なしで自由に回転できる. 次の図を見てください:
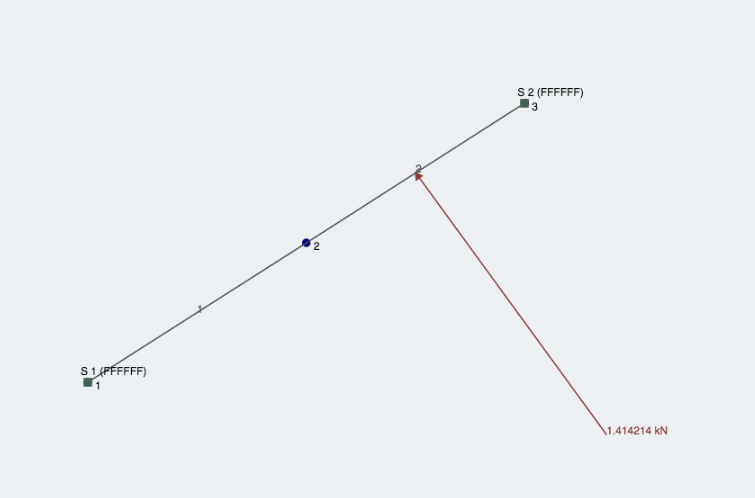
 可動ヒンジジョイント/接続の例
可動ヒンジジョイント/接続の例
負荷がかかった状態で2番目のメンバーが自由に回転する様子を確認できます. メンバーは曲げモーメントを他のメンバーに伝達していません. これは、 0 接続ノードの曲げモーメント, 曲げモーメントに対する拘束がないことを意味します.
ヒンジ接続について
接続がどのように機能するかを完全に理解する最良の方法は、 ノードはメンバーの端に接続されています. 一定の自由度がある場合, 次に、メンバーがノードに溶接されます - ノードが行くところ, メンバーが行く! 次の2つのメンバーを取る:
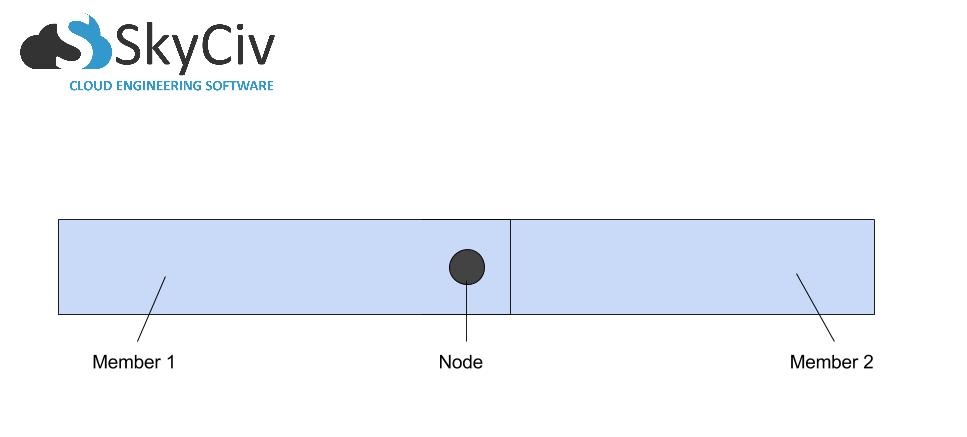
共通のノードによって結合されていることがわかります. では、メンバーを分けて詳しく見ていきましょう:
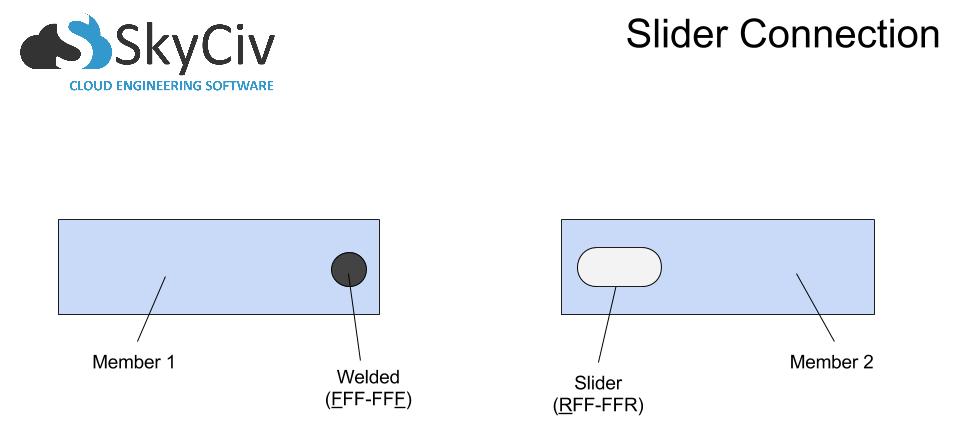
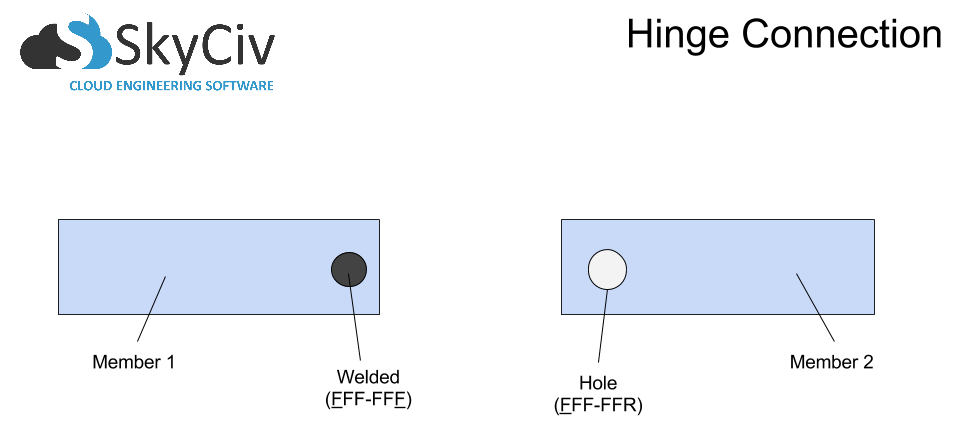
左に, メンバーがいます 1, FFF-FFFの拘束コードでノードに固定. 右側に, メンバーがいます 2, この例では、ノードがXに沿ってスライドし、Zを中心に回転できるように全体が切り取られています. これはRFF-FFRで示されます. この例を選択したのは、X軸に沿った動きを簡単に理解して視覚化できるためです。. これは、X軸に平行移動できるヒンジジョイントの例です。. ローカルX軸に沿った動きを制限したい場合, 次の接続をモデル化するだけです:
ヒンジジョイントのモデリング方法
エンドの固定性を理解したら, ソフトウェアでこれをモデル化する時が来ました. 2つのメンバー間の単純な接続を取る:
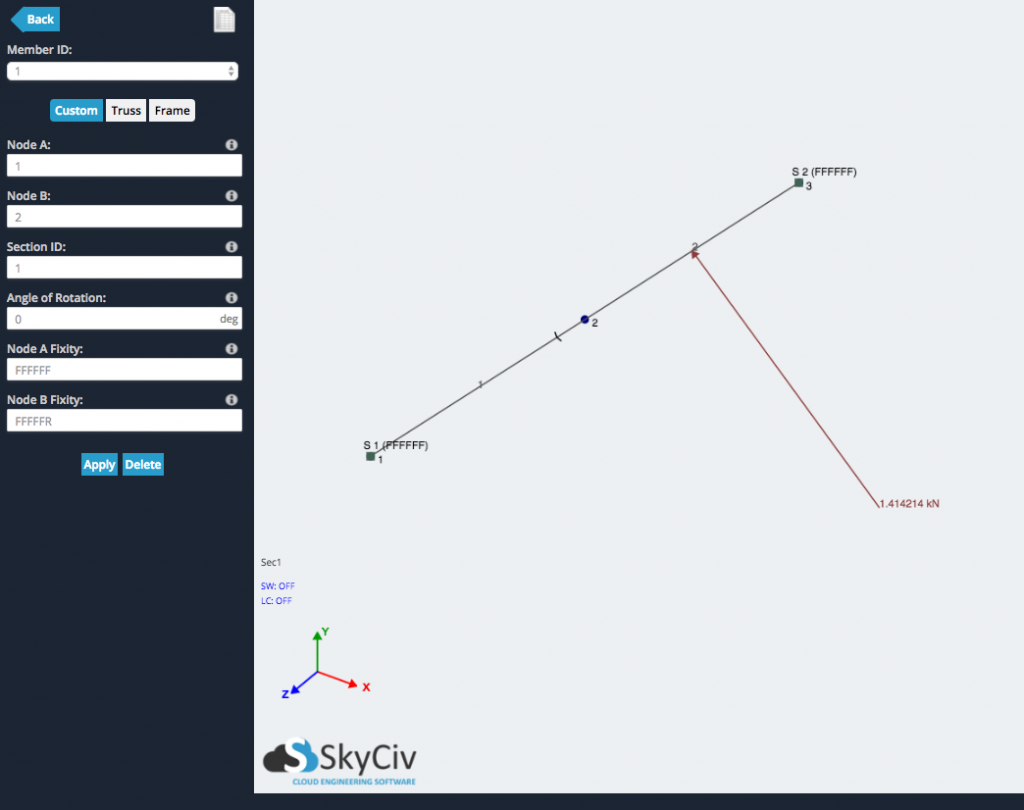
この接続を変更するには (ノード 2 図中) ヒンジジョイントに, メンバーの修正の1つをFFF-FFRに変更するだけです (下に見られるように). 左の入力メニューで、メンバー1の終わりが「FFFFFR」で示されていることがわかります。. これを行うことで, 図に小さな「ダッシュ」が追加されているはずです, メンバーが固定接続ではなくなったことを示します:
構造を分析した後, 接続に曲げモーメント力があるかどうかを確認できます. 部材間で曲げ力が伝わらないため, あるはずです 0 ヒンジが存在する節点での曲げモーメント:
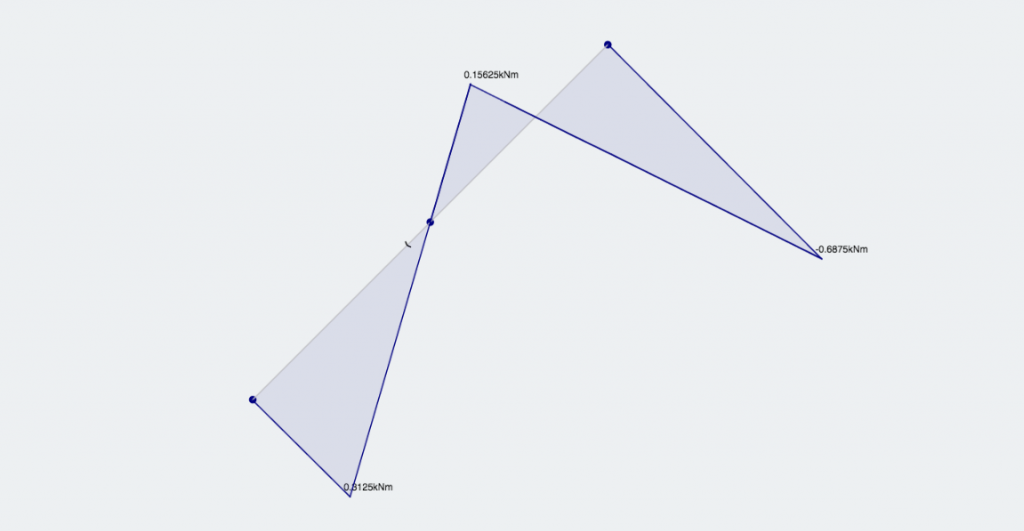
曲げモーメント力は 0 ヒンジ接続で

SkyCivのCEOおよび共同創設者
ベン (民事), BCom