Voor John Morey, een levenslange interesse in raceauto's voor het beklimmen van heuvels leidt tot een geweldig project, geholpen door SkyCiv. Opgroeien en alles lezen over motorfietsen en auto's, ze repareren en wijzigen, hij concludeerde dat hij de persoon wilde zijn die de beslissingen nam als het ging om het samenstellen van dingen. Vanaf de leeftijd van 20-22, hij bezat een racewagen die uiteindelijk werd verwoest door een crash. 50 jaren later, hij heeft zijn passie voor de sport nieuw leven ingeblazen en is gepassioneerd over het bouwen van een nieuwe auto.
Type: Mechanisch
Ingenieur: John Morey
“Ik kan je niet uitleggen hoe gemakkelijk en nuttig je programma was om te gebruiken, en het maakte een belangrijk verschil voor het project.”
Over het project
Voor dit project, John wilde een eenvoudige maar lichte en krachtige raceauto voor het beklimmen van heuvels maken, beginnend met een opgeschaalde skelter en een 1300cc motor. Op het moment dat dit werd uitgebracht, John werkte aan het daadwerkelijk construeren van zijn droom, en we zijn erg enthousiast om het te zien als het klaar is!

Figuur 1: Vergelijkbare raceauto voor het beklimmen van heuvels als die ontworpen door John
De uitdaging
De belangrijkste prioriteit van dit project was de veiligheid van de bestuurder, wat leidde tot de ontwikkeling van een 3D-ruimteframeontwerp. Er is veel werk verzet om het frame op te schalen van een klein model naar levensgroot. voornamelijk, de uitdaging hier is om de stijfheid en lichtheid te behouden voor de krachten die tijdens de race zouden worden gezien.
In dit geval, Hill Climb-auto's met één stoel en open wielen nemen deel aan de “Formules Libre” klas, wat betekent dat de auto's in deze competitie niet worden beïnvloed door veel regels, de technische beslissingen gemakkelijker en vergevingsgezinder maken.
Verschillende soorten ophanging moesten hier worden overwogen, maar de “vorkbeen” ontwerp werd gekozen door John en zijn team. Om de downforce voor de auto te maximaliseren, John was in staat om de totale breedte van de auto te krijgen 2.5 meter, zo breed als de aanhanger vereist. Deze grotere plattegrondafmetingen geven de auto meer oppervlakte onder de auto, helpen met downforce bij hoge snelheden, wat buitengewoon belangrijk is bij scherpe bochten en hoeken.
Een ander technisch aspect van deze uitdaging is de acceleratie van de auto. Volgens John, acceleratie mag bij volle snelheid niet begrensd zijn. Om dit te bereiken heb je 4WD en ongeveer nodig 400 HP wat heel goed mogelijk is met een supercharged 1300 cc motor. Het vereist alleen een “veer gaspedaal” van de lijn, maar op volle snelheid & downforce, een enorme krachtoverbrenging is mogelijk.
Een samenvattend sentiment van John:
“Het project is logischerwijs overgegaan van eenvoudig naar complex gedurende vele jaren van iteraties, met behoud van de stijfheid, laag gewicht, en veiligheid van de bestuurder.”
Hoe het is ontworpen
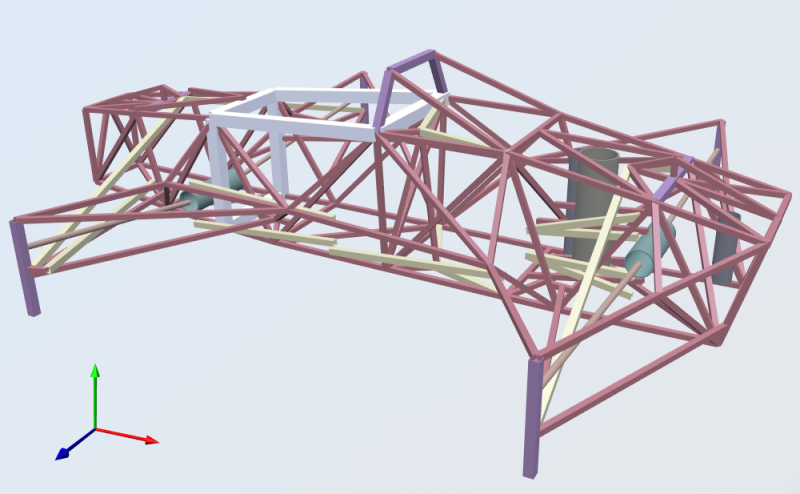
Figuur 2: 3D-weergave van het afgewerkte SkyCiv Structurele 3D-product
Bergopwaartse raceauto's bestaan al een tijdje, dus er is nogal wat van bestaande, algemene kennis van de branche inclusief het minimumgewicht, wanddikte, maakbaarheid, veiligheidsaanbevelingen, enzovoort. Voor dit project, de “vorkbeen” het ontwerp van de ophanging betekende dat er extra buigsterkte van de verbindingsbuizen nodig was.
Met de hand, ruimteframe-ontwerp bij het aannemen van penverbindingen is extreem tijdrovend voor een project als dit. Ingenieurs die deze route volgen, hebben de neiging om fouten te maken, en omdat in de praktijk lasverbindingen (vaste verbindingen) bestaan, het zou eigenlijk onmogelijk zijn om met de hand te voltooien. Dit is waar SkyCiv in het spel kwam voor John.
Het genereren van de geometrie van het frame in SkyCiv van het project veranderde in een leerproces voor John. Hij begon met een klein aspect van de auto met behulp van metingen van handgetekende tekeningen gemaakt door John, beginnend met de hoepel van de bestuurder. Hij realiseerde zich dat deze berekeningen met de hand moeilijk zouden worden, dus voegde hij geleidelijk meer en meer toe aan de kleine structuur die hij had toen hij leerde hoe hij de moest gebruiken SkyCiv-platform.
Wat betreft de veerophangingen, John besloot deze te modelleren als stijve framebuizen, omdat hij zich bezighield met krachten en spanningen, geen doorbuiging van de veer.
“Verbazingwekkend genoeg was ik in staat om het na een paar uur te doen, en de antwoorden waren logisch in termen van de spanningen die ik met de hand had berekend, dus ik begon toe te voegen aan mijn enkele rechthoekige model en eindigde met de hele auto, inclusief speling van de kettingaandrijving en speling van de ophanging van de stoterstang.”
Van versnelling en krachten in g's gaan was vrij eenvoudig voor John met SkyCiv. Basis vrijlichaamsdiagrammen binnen en vooraanzicht met versnelling in g's werden gebruikt om de belastingen te berekenen, gezien het gewicht van het frame, die hem automatisch werden gegeven van SkyCiv.
Voor John, het was ook duidelijk dat het bovenlichaam en de benen van de bestuurder diagonalen over die rechthoeken uitsluiten, dus ze zijn ruwweg met de hand ontworpen als balken. Hij kwam erachter tijdens het rechttrekken van mijn ruimteframe 50 jaar geleden dat ongeveer 90% van de torsieflexibiliteit treedt op in deze 2 rechthoeken, in een verder goed driehoekig ruimteframe.
De draagarmbelastingsgevallen & spanningsberekeningen werden aanvankelijk met de hand gedaan met vrijlichaamsdiagrammen, eenvoudiger gemaakt dan de exacte situatie, zodat ik een handberekening kon doen, en dan met extra veiligheidsfactor toegevoegd.
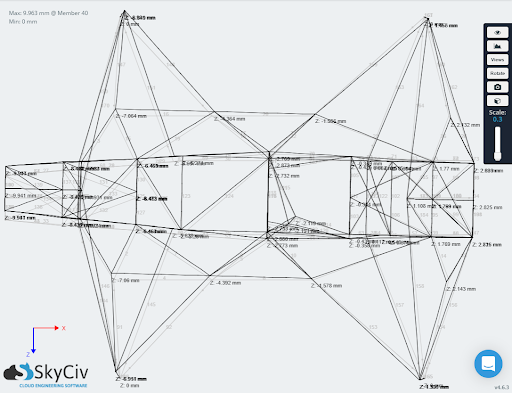
Figuur 3: Doorbuigingsresultaten bovenaanzicht voor een voorbeeld van een belastinggeval
Hoe SkyCiv hielp
Voor de meeste mechanische projecten zoals deze, extreem robuuste en complexe software is nodig voor de analyse van complexe, bewerkte onderdelen. Maar voor John, hij kon profiteren van de snelle en gemakkelijke modellerings- en analysefuncties van Structurele 3D – een module die niet vaak wordt gebruikt voor het ontwerp van het racewagenframe. Meestal gebruikt voor constructief bouwen en frameontwerp;, hij was in staat om de veelzijdigheid van het SkyCiv-platform te gebruiken voor zijn geweldige project.
Aan het begin van het project, het was absoluut noodzakelijk voor John om enkele handberekeningen te bevestigen die hij had voltooid, maar belangrijker nog:, ontdek de vervormingen van zijn frame. De belastinggevallen voor 3 g bochten, 3 g remmen, 3 g versnelling, 3 g bump waren volgens John makkelijk aan te brengen.
“…de resultaten van de lineaire spanning / doorbuiging waren gemakkelijk te begrijpen op het weergegeven model, die ook echt goede schaduwen heeft.”
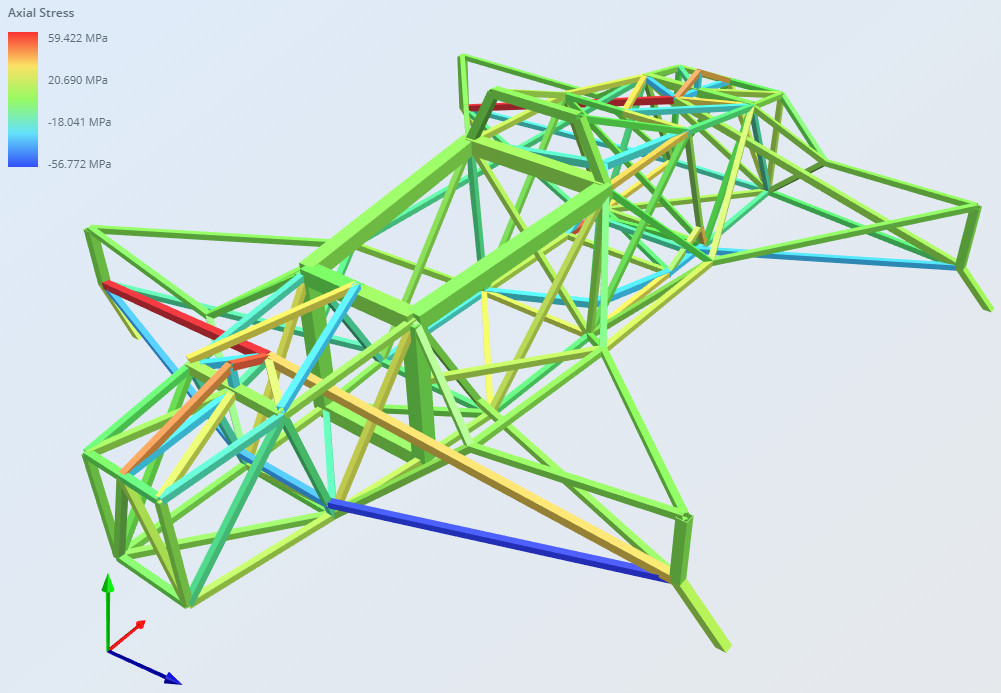
Figuur 4: 3D weergegeven Structurele 3D Axiale spanning is het gevolg van neerwaartse druk en belasting in bochten op het frame
Zonder een softwarehulpmiddel, hij verwachtte volledig op te geven als het te veel werd. De krachten kennen die bij de bediening van de auto aanwezig zijn, John was in staat om de analytische solver in Structural 3D te gebruiken om de spanningen van zijn frame-elementen en de resulterende doorbuigingen te krijgen.
John spreekt over de waarde van de 3D-weergave en weergave van analytische resultaten:
“Ik heb verschillende interferenties gevonden die niet duidelijk waren uit mijn tekeningen en ik heb verschillende moeilijke posities van diagonale staven kunnen verbeteren. Dit wees de weg voor vele andere kleine maar belangrijke veranderingen in de vorm van het chassis en bespaarde veel handgetekende pagina's met wijzigingen.”
Voortkomend uit de toepassing van 3g bochten, remmen, versnelling, en “buil” belastingsgevallen, John gebruikte de doorbuigingsresultaten om zijn handberekeningen te controleren en te verifiëren, waardoor hij transversale veranderingen in zijn ruimteframe kan maken. Dit was nodig om zowel het gewicht als de stijfheid van het frame van de auto te optimaliseren. Bijvoorbeeld, uiteindelijk moet hij het frame rond de benen en het heupgebied van de bestuurder vergroten voor een grotere crashveiligheid.